Products
We design and manufacture high-quality and cost effective drivers and controllers for DC brush, BLDC and stepper motors
Products
We design and manufacture high-quality and cost effective drivers and controllers for DC brush, BLDC and stepper motors

DC brushless motor controllers
BLDC motor controllers for speed and position control of 3-phase DC brushless motors with Hall sensors. Two series BLD and BLSD are intended for BLDC control 24V - 48V motors power up to 1000 W power.

DC brush motor controllers
Our models BMD and BMSD series provide 12V and 24V motor speed control for DC brush motors up to 40A rated current. Our controllers also provide position control for models with encoder.

Controllers for DC linear actuators
The controllers regulates speed and movement direction of the actuators. Actuator speed is regulated by 0 - 5 VDC analog signal or can be adjusted by an internal potentiometer.

Stepper motor drivers STEP/DIR
We offer the stepper motor drivers for full line of motors. SMD drivers process STEP (Pulse) and DIR (Level) signals as motion reference. High level voltage is 5 ‑ 24 VDC which is suitable for the most signal sources.

Stepper motor controllers
We offer stepper motor controllers for full line of stepmotors - from tiny motors 20 mm size up to high torque stepper motors 130 mm size. Current per phase from 0.1 Amp to 8.0 Amp.

Stepper motors with integrated controllers
Stepper motor with integrated microstepping controller is a ready to work assembled unit. The drive provides smooth running, high dynamics and precise positioning.
DC brushless motors (BLDC)
DC brushless motors (BLDC) provide low noise and high speed motion. These are synchronous electric motors powered by direct-current, with electronic control commutation based on internal Hall sensors.

DC brush geared motors
Brush motors are easy to use and in common don't need any electronics to run. At once there is possibility to improve dc brush motor movement in order to adjust motion for exact application.
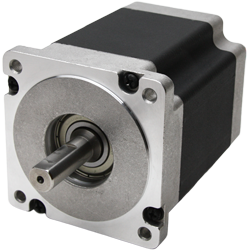
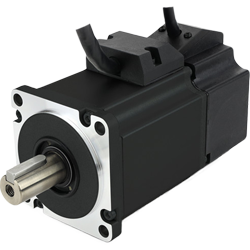
Stepper motors
Stepper motors provide precise economically effective low cost motion. The operation of stepper motors is easy to control and doesn't require feedback and expensive complicated devices.

DC linear actuators
LD3 linear actuators have a compact design, ideal for applications where space is limited. Robust, quiet and powerful actuators can be equipped with built-in Hall sensors.

AC servo motors Estun
Estun AC servo motors provide great performance and high resolution, smooth and precise motion. A wide power range from 50 W up to 22 kW, different feedback systems, brake option is available.

AC servo drivers Estun
AC servo drivers from ESTUN are designed with its excellent performance and practical control functions, compatible with mainstream controllers, offer high-speed and high-precision machine solutions.

Gearboxes for BLDC and stepper motors
Planetary and worm gearboxes which can be combined with brushless DC motors as well as with stepper motors.

Encoders
These encoders have a 5 V TTL signal (A and B) as well as the index signal I. They are optionally available with line drivers which also provide inverted signals.

Brakes
Electrically operated spring-loaded brake with an extremely compact design for use as a static holding brake.

Accessories
We offer connection cables for BLDC and stepper motors and brushless DC motors with protection class IP65.