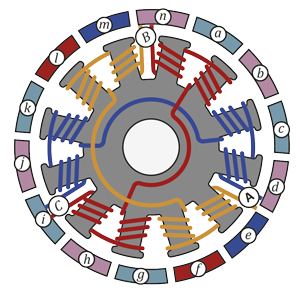
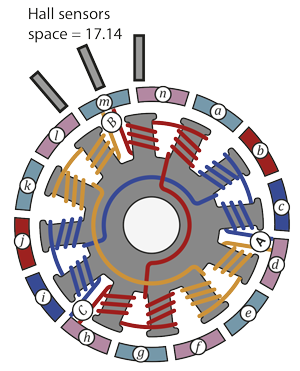
Para ilustrar el proceso de conmutación de un motor brushless de CC, consideremos una de sus implementaciones: un motor BLDC con doce bobinas en el estator y catorce imanes en el rotor. Hay muchas opciones para el devanado y el número de bobinas/imanes, pero el principio sigue siendo el mismo. A continuación se muestra un diagrama (los polos de los imanes están marcados en rojo y azul), el devanado se muestra en azul, rojo y naranja, los sensores Hall aún no están marcados.
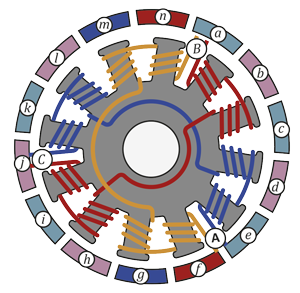
Comencemos la conmutación. En el primer paso, damos energía a los devanados A (+) y B (-). C permanece desconectado. Como resultado, la corriente fluirá por las bobinas devanadas con el cable naranja. Las bobinas están devanadas en direcciones diferentes, por lo que las dos bobinas superiores serán atraídas por los imanes m y n, y las dos inferiores por los imanes g y f. El resto de bobinas e imanes no juegan prácticamente ningún papel en esta configuración. Con semejante suministro de energía al motor, obviamente no girará, y tendrá siete posiciones estables del rotor, distribuidas uniformemente por toda la circunferencia (la bobina naranja superior izquierda del estator puede atraer a los imanes m, a, c, e, g, i, k).
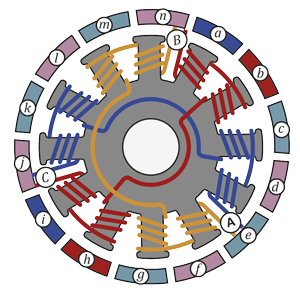
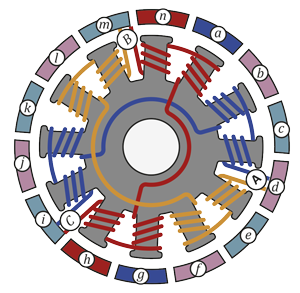
Y ahora cambiemos la conmutación: apliquemos potencia a B (-) y C (+). Las bobinas rojas atraerán los imanes a, b, h e i, el rotor girará ligeramente. El ángulo de giro del rotor se puede calcular como (360*2/12) - (360*2/7) = 8.57°. Si se cambia la conmutación a C (+) y A (-), el ángulo de rotación será de 17,14°.
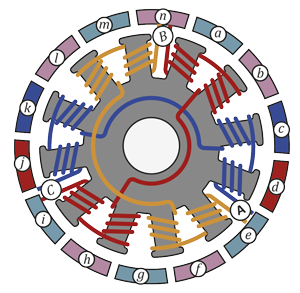
Apliquemos voltaje para alinear los imanes con las bobinas verdes. Los imanes rojo y azul se han intercambiado, así que ahora tenemos que aplicar voltaje inverso. El ángulo de rotación es de 25,71°.
Lo mismo ocurre con las dos posiciones restantes. El ángulo de rotación es de 34,29°.
El ángulo de rotación es de 42,85
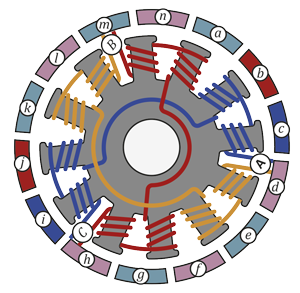
Repitamos de nuevo el primer paso: el rotor girará exactamente una séptima parte de una vuelta completa. Así pues, el motor tiene tres conductores en total, y es posible aplicar voltaje a dos de ellos de seis maneras diferentes 6 (23 - 2 = 6). Estas 6 posiciones ya se han recorrido. Si el voltaje no se aplica caóticamente, sino en un orden estricto, que depende de la posición del rotor, entonces el motor girará. A continuación se muestra la tabla resumen de conmutaciones y ángulos de rotación. 5°.
| Angulo de rotación del rotor | A | B | C |
| 0° | + | - | No está conectado |
| 8.57 | No está conectado | - | + |
| 17.14 | - | No está conectado | + |
| 25.71 | - | + | No está conectado |
| 34.29 | No está conectado | + | - |
| 42.85 | + | No está conectado | - |
A diferencia de los motores de CC de escobillas, en los que la conmutación se realiza mediante escobillas, los motores BLDC necesitan un método para determinar la posición del rotor. Existen diferentes implementaciones de estos métodos. Los más comunes son el uso de sensores Hall o de back EMF.
Detección de la posición del rotor mediante sensores Hall
Si se añaden tres sensores Hall al diagrama existente del motor BLDC de forma que aparezca un 1 lógico en el momento en que se encuentre frente al imán rojo, es posible obtener 6 estados diferentes. Estrictamente hablando, hay un total de 8 posibles estados diferentes (0 o 1) para 3 sensores Hall. Pero debido a la distancia entre los sensores, los tres no pueden estar en 0 lógico o 1 lógico. Por lo tanto, en este caso, se pueden considerar 6 estados (23 - 2).
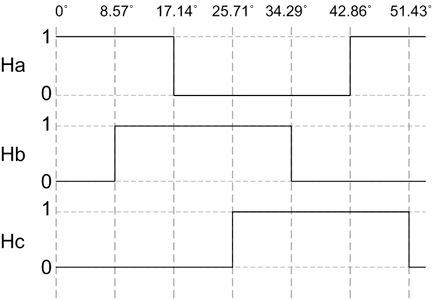
Es importante que los sensores generen tres señales situadas a una distancia de un tercio de período entre sí. Un tercio de período equivale a 120 grados. Por lo tanto, se considera que los sensores están situados a 120 grados entre sí. Para controlar un motor sin escobillas, basta con leer las señales de los sensores Hall y, en consecuencia, conmutar el voltaje en los devanados.
Puede elegir el motor sin escobillas de CC con sensores Hall que mejor se adapte a su proyecto en nuestro sitio web, en la sección
Motores DC brushless (BLDC).
Los controladores de motores DC brushless para motores BLDC con sensores Hall están disponibles para su compra en nuestra tienda online shop.smd.ee
En muchos casos, la posición del rotor se determina sin utilizar sensores Hall. Para ello, se analizan la corriente en los devanados y la EMF de retorno. Sin embargo, este método tiene sus inconvenientes y es poco aplicable en casos en los que se requieren velocidades bajas y un par de arranque elevado, y también se utiliza menos en tareas de posicionamiento.
Comparación con los motores paso a paso
Hasta cierto punto, los motores paso a paso y algunos diseños de motores BLDC sin sensores Hall son conceptualmente similares. La principal diferencia es el número de fases y polos. Los motores paso a paso, por regla general, se conmutan con dos fases desplazadas 90°, mientras que los motores sin escobillas se conmutan principalmente con tres fases desplazadas 120°. Además, los motores paso a paso están diseñados para aumentar el par de retención y la repetibilidad de los pasos, mientras que los motores sin escobillas sin sensores Hall están diseñados para aumentar la velocidad y la suavidad de rotación, lo que afecta al número de devanados, rodamientos, etc. Pero al final, un motor sin escobillas normal se puede utilizar en modo paso a paso, y un motor paso a paso se puede utilizar en modo de rotación constante. Sus controles serán los mismos.