Para hacer girar un motor de corriente continua sin escobillas, es necesario que el campo magnético constante del rotor sea arrastrado por el campo electromagnético giratorio del estator, como en un motor de corriente continua convencional.
La rotación del campo magnético del estator se lleva a cabo conmutando los devanados mediante una unidad de control electrónico. El diseño de un motor sin escobillas es similar al de un motor síncrono de CA. Si se conecta el motor sin escobillas a una red de CA trifásica que satisfaga los parámetros eléctricos del motor, éste funcionará.
Una cierta conmutación de los devanados de un motor sin escobillas permite controlarlo desde una fuente de CC. Para entender cómo crear una tabla de conmutación para un motor sin escobillas, es necesario considerar el control de una máquina síncrona de CA.
Motor síncrono
La máquina síncrona se controla desde una red de corriente alterna trifásica. El motor tiene 3 devanados eléctricos, desplazados 120 grados eléctricos.
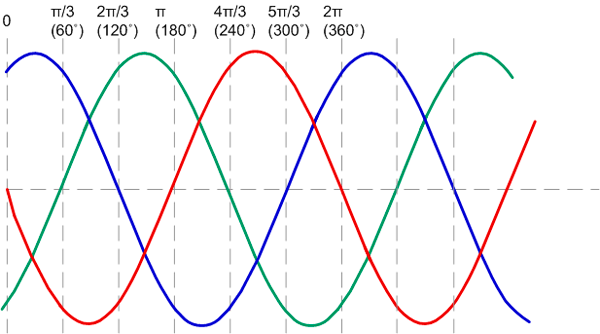
Si se arranca un motor trifásico como un generador, un campo magnético constante inducirá un EMF en cada uno de los devanados del motor.
Los devanados del motor se distribuyen uniformemente, se inducirá una tensión sinusoidal en cada una de las fases y estas señales se desplazarán entre sí 1/3 del periodo (Fig. 1). La forma del EMF cambia como una cantidad sinusoidal, el periodo de la sinusoide es 2π (360 grados), como estamos tratando con cantidades eléctricas (EMF, voltaje, corriente), el periodo se mide como grados eléctricos.
Cuando se aplica tensión trifásica al motor, en cada instante de tiempo habrá un determinado valor de corriente en cada uno de los devanados.
Cada devanado genera un vector de campo magnético proporcional a la corriente en el devanado. El vector de campo magnético resultante es la suma de los vectores de campo magnético de los tres devanados. Dado que con el tiempo la corriente en los devanados del motor cambia como una onda sinusoidal, la magnitud del vector de campo magnético de cada devanado cambia, y el vector total resultante cambia el ángulo de giro, mientras que la magnitud de este vector permanece constante.
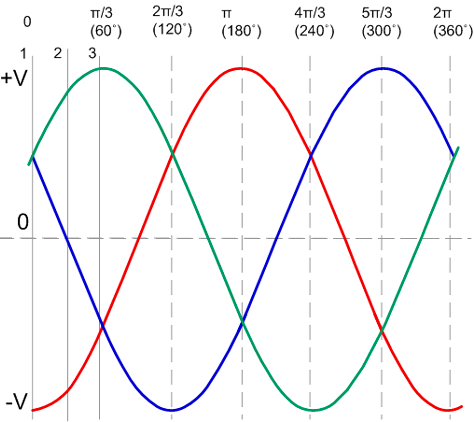
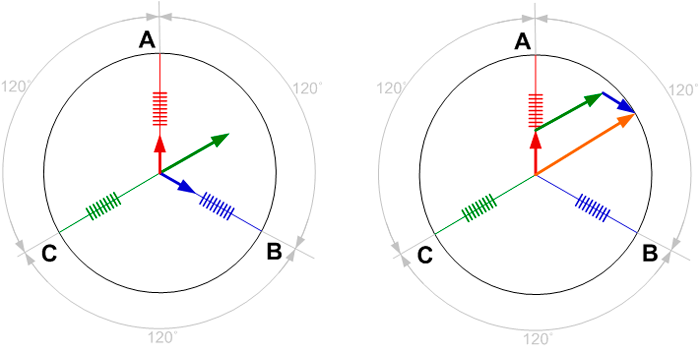
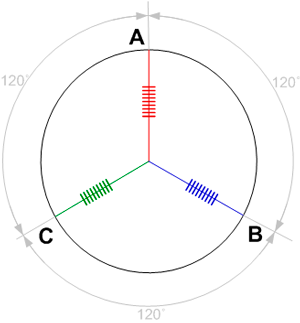
La figura 2 muestra un periodo eléctrico de un motor trifásico. Este periodo está marcado con 3 puntos arbitrarios. Vamos a trazar este período (360 grados eléctricos) en un círculo para construir un vector de campo magnético en cada uno de estos puntos. Coloquemos 3 devanados del motor desplazados 120 grados eléctricos entre sí (figura 3).
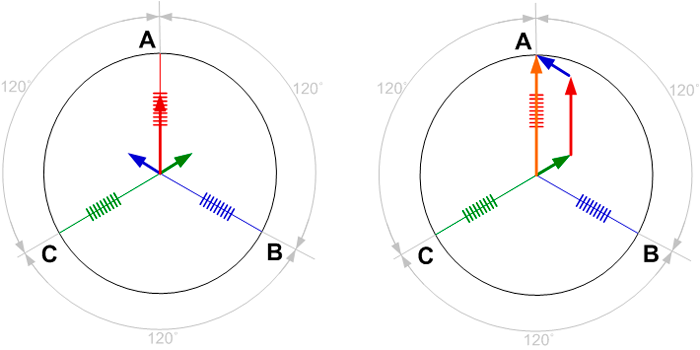
A lo largo de cada fase se construye un vector de campo magnético creado por el devanado del motor. La dirección del vector viene determinada por la dirección de la corriente continua en el devanado. Si la tensión aplicada al devanado es positiva, entonces el vector se dirige en dirección opuesta al devanado; si es negativa, entonces a lo largo del devanado. La magnitud del vector es proporcional a la tensión en la fase en un punto dado.
Para obtener el vector campo magnético resultante, es necesario sumar los datos vectoriales según la ley de adición de vectores.
La construcción es similar para el segundo y el tercer punto.
Así, con el tiempo, el vector resultante cambia suavemente de dirección. La figura 5 muestra los vectores resultantes y muestra la rotación completa del campo magnético del estator en un periodo eléctrico.
Este vector de campo magnético eléctrico es seguido por el campo magnético de los imanes permanentes del rotor en cada instante de tiempo (figura 6).
Así funciona una máquina síncrona de CA. Al tener una fuente de corriente continua, es necesario formar de forma independiente un período eléctrico con un cambio en la dirección de la corriente en tres devanados del motor. Dado que un motor sin escobillas tiene el mismo diseño que un motor síncrono y tiene parámetros idénticos en modo generador, es posible comenzar con la figura 5, que muestra el campo magnético giratorio generado.
Voltaje CC
La alimentación de CC sólo tiene 2 hilos "+" y "-", lo que significa que sólo es posible suministrar tensión a dos de los tres devanados. Es necesario aproximar la figura 5 y destacar todos los momentos en los que es posible conectar 2 fases de las tres.
El número de permutaciones del conjunto 3 es 6, por lo tanto, hay 6 opciones para conectar los devanados.
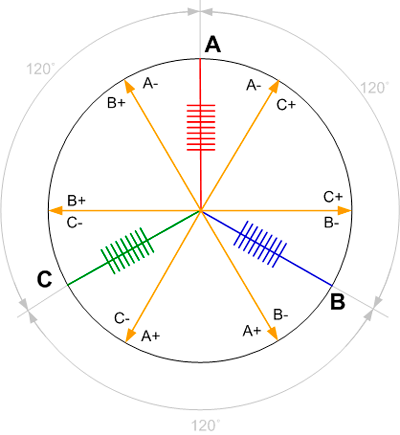
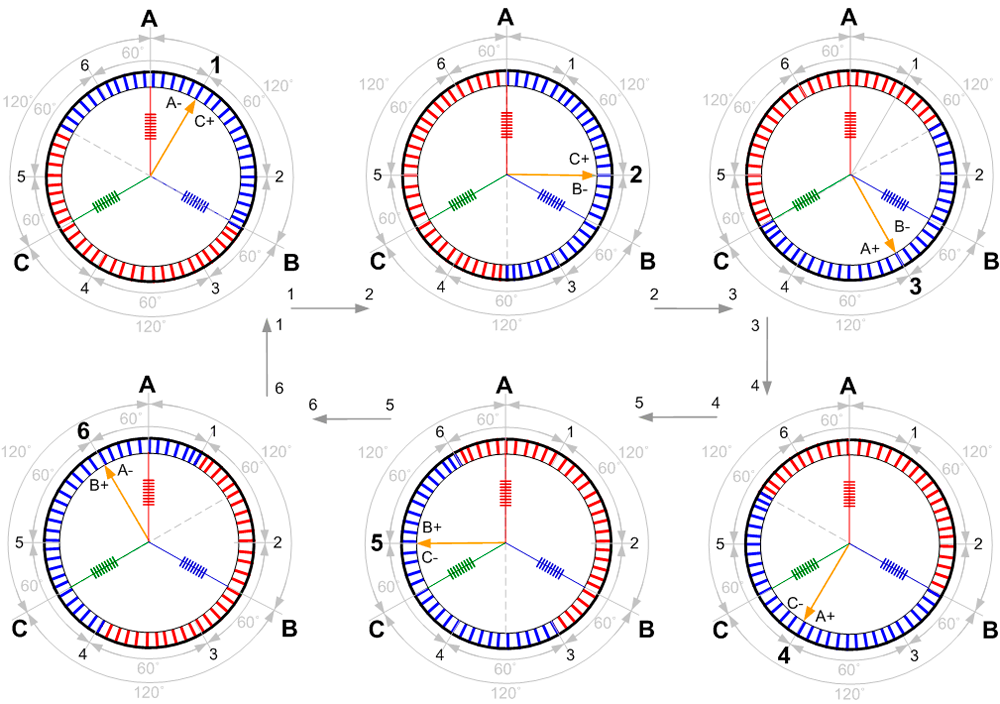
Dibujemos las posibles opciones de conexión y destaquemos la secuencia en la que el vector seguirá girando paso a paso hasta que llegue al final del periodo y vuelva a empezar y consideremos el periodo eléctrico a partir del primer vector.
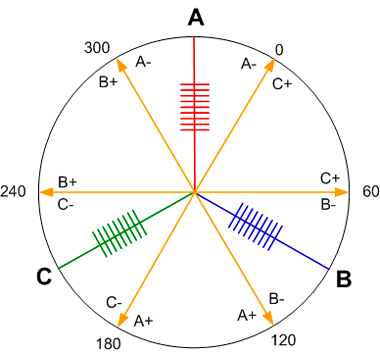
La figura 5 muestra que cuando se controla el voltaje sinusoidal trifásica, hay muchos vectores que giran suavemente con el tiempo, y cuando se conmuta con corriente continua, es posible obtener un campo giratorio de sólo 6 vectores, es decir, la conmutación al paso siguiente debe producirse cada 60 grados eléctricos. Los resultados de la figura 7 se resumen en la Tabla 1.
| Voltaje + | Voltaje - | Bobinado no conectado |
| w | u | v |
| w | v | u |
| u | v | w |
| u | w | v |
| v | w | u |
| v | u | w |
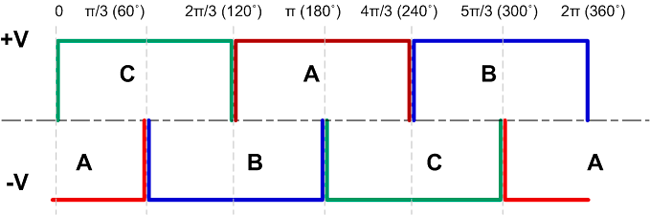
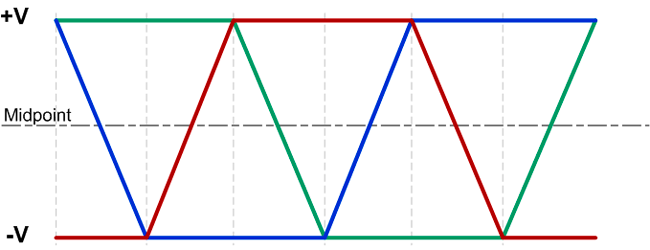
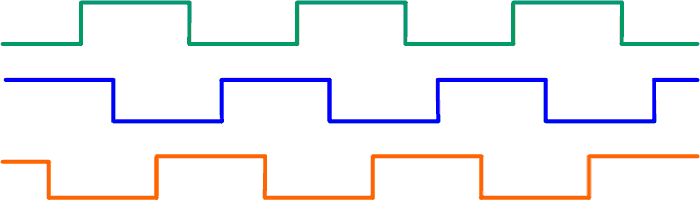
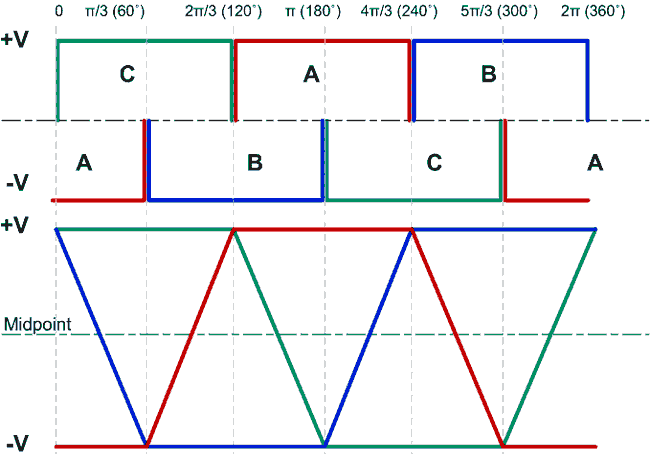
El aspecto de la señal de control resultante de acuerdo con la Tabla 1 se muestra en la Figura 8. Donde -V es la conmutación al negativo de la fuente de alimentación (GND), y +V es la conmutación al positivo de la fuente de alimentación.
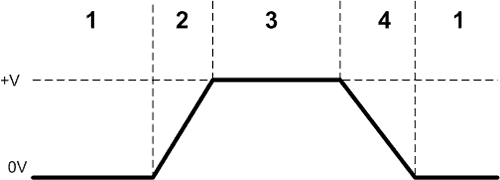
Sin embargo, la imagen real de las fases del motor será similar a la señal sinusoidal de la figura 1. La señal tiene forma trapezoidal, ya que en los momentos en que el devanado del motor no está conectado, los imanes permanentes del rotor inducen una FEM sobre él (Figura 9).
Características de diseño
Como ya se ha comentado, un periodo eléctrico de 360 grados eléctricos se forma en 6 conmutaciones devanadas. Es necesario relacionar este periodo con el ángulo real de rotación del rotor. Los motores con un par de polos y un estator de tres dientes se utilizan muy raramente. Los motores tienen N pares de polos.
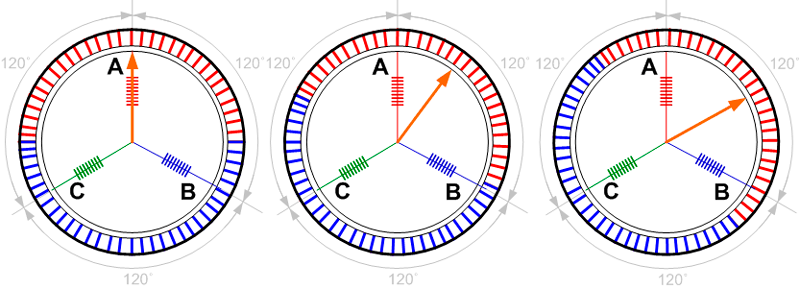
La figura 10 representa modelos de motores con un par de polos y dos pares de polos.
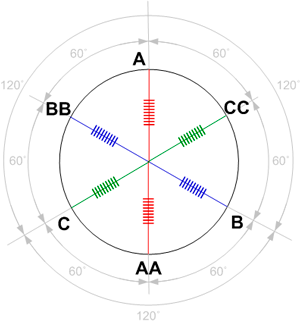
Un motor con dos pares de polos tiene 6 devanados. Cada uno de los devanados está emparejado. Cada grupo de 3 devanados está desplazado 120 grados eléctricos. La figura 11b muestra un periodo para 6 devanados. Los devanados A‑AA, B‑BB, C‑CC están interconectados y representan estructuralmente 3 hilos - terminales de fase. Para simplificar la figura, no se muestran las conexiones, pero se supone que A‑AA, B‑BB, C‑CC son iguales.
La figura 11, basada en los datos de la tabla 1, muestra los vectores para uno y dos pares de polos.
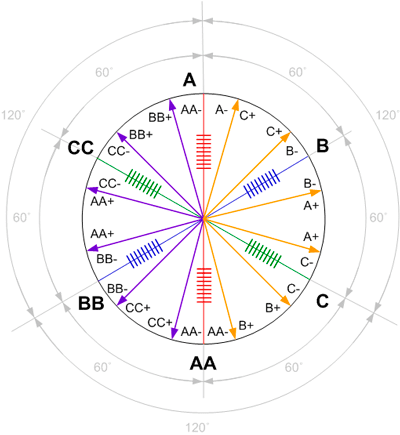
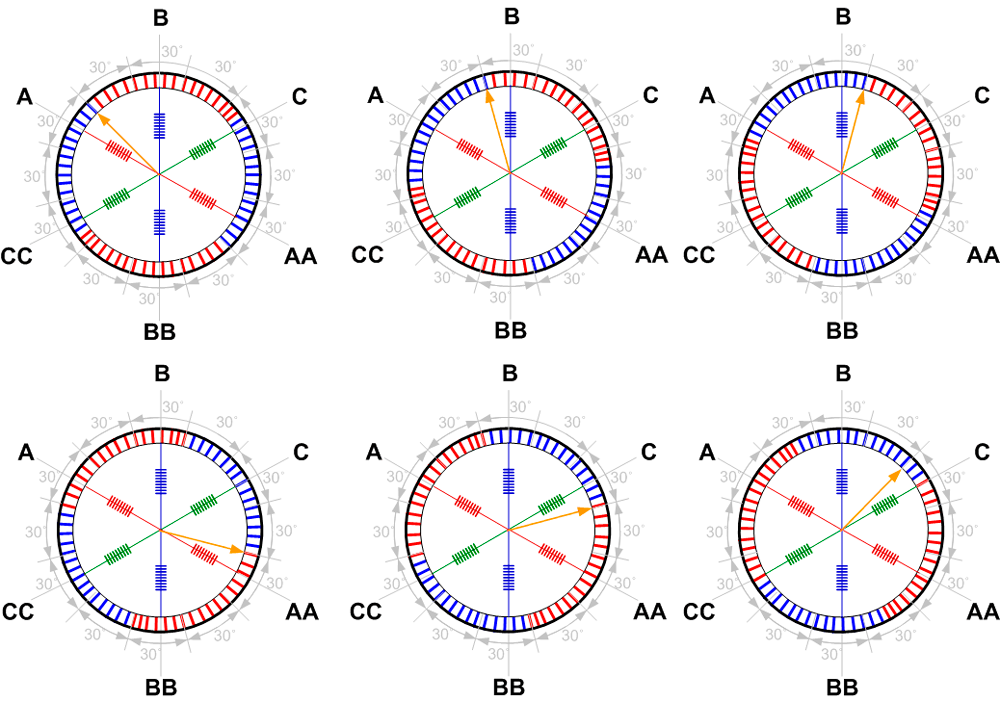
La figura 12 muestra los vectores creados por 6 conmutaciones de los devanados del motor con un par de polos. El rotor está formado por imanes permanentes, en 6 pasos el rotor girará 360 grados mecánicos.
La figura muestra las posiciones finales del rotor. El rotor gira del estado anterior al siguiente conmutado en los intervalos entre dos posiciones adyacentes. La siguiente conmutación debe producirse cuando el rotor alcanza esta posición final. El rotor tenderá a una nueva posición, de modo que su vector de campo magnético pase a estar codirigido con el vector de campo electromagnético del estator.
Si el motor tiene N pares de polos, entonces deben transcurrir N periodos eléctricos para completar una revolución mecánica completa.
Un motor con dos pares de polos tendrá dos imanes con polos S y N, y 6 devanados (figura 13). Cada grupo de 3 devanados está desplazado entre sí 120 grados eléctricos.
Detección de la posición del rotor de un motor de CC sin escobillas
Como se ha indicado anteriormente, para que el motor gire, es necesario aplicar tensión a los devanados del estator requeridos en los momentos determinados. La tensión debe aplicarse a los devanados del motor en función de la posición del rotor, de modo que el campo magnético del estator siempre adelante al campo magnético del rotor. Para detectar la posición del rotor del motor y la conmutación de los devanados se utiliza una unidad de control electrónica. La detección de la posición del rotor es posible de varias maneras:
- Utilizando sensores Hall
- Análisis del back EMF
Normalmente, los fabricantes equipan el motor con sensores Hall de fábrica, por lo que éste es el método de control más común. La conmutación de los devanados de acuerdo con las señales de la contraEMF permite abandonar los sensores incorporados en el motor y utilizar la información de la fase no conectada del motor, que será inducida por el campo magnético de la contraEMF.
Control de motores de CC sin escobillas con sensores Hall
Los sensores Hall son la forma más común de monitorizar la posición del rotor de un motor DC brushless para conmutar sus devanados.
Como hay 6 estados del vector de campo magnético, se necesitan 3 sensores Hall para representar un sensor de posición absoluta con una salida de 3 bits. Los sensores Hall se instalan del mismo modo que los devanados, desplazados entre sí 120 grados eléctricos. Esto permite utilizar los imanes del rotor como elemento actuador del sensor.
Para que el motor gire, el campo magnético del estator debe estar por delante del campo magnético del rotor. La posición en la que el vector del campo magnético del rotor está codirigido con el vector del campo magnético del estator es la final para esta conmutación. Es el momento en el que, teóricamente, debe producirse el cambio a la siguiente combinación para evitar que el rotor quede colgado en una posición estacionaria. Pero si se profundiza en el proceso, queda claro que el cambio debería producirse mucho antes. Cuando los vectores del campo magnético del rotor y el estator están codirigidos, el par del motor ya es cero. Con este control, el motor no girará con el par máximo, sino con sus restos. Además, hay que tener en cuenta que la corriente no aumentará instantáneamente tras la conmutación, lo que significa que a altas velocidades de rotación la conmutación debe realizarse incluso antes. Para que el motor funcione en modo de par óptimo, es necesario esforzarse por mantener una media de 90 grados entre el flujo del rotor y el del estator (corriente del estator).
Ahora comparemos las señales de los sensores Hall con la combinación de fases que deben conmutarse (Tabla 2)
| Sensores Hall | Fases del motor | |||||
| Posición del rotor | Ha | Hb | Hc | A | B | C |
| 0 | 0 | 0 | 1 | 0 | - | + |
| 1 | 0 | 1 | + | - | 0 | |
| 1 | 0 | 0 | + | 0 | - | |
| 1 | 1 | 0 | 0 | + | - | |
| 0 | 1 | 0 | - | + | 0 | |
| = 360/N | 0 | 1 | 1 | - | 0 | + |
Los sensores Hall envían una señal desplazada 1/6 del periodo (es decir, 60 grados eléctricos) cuando el motor gira de forma constante (figura 14).
Control del motor DC brushless mediante BEMF
Hay motores DC brushless sin sensores Hall. La posición del rotor de tales motores puede detectarse utilizando la señal EMF en la fase no conectada del motor. En cada momento se aplica tensión "+" a una de las fases, "-" de una fuente de alimentación a la otra, y una de las fases permanece sin conectar. Durante la rotación, el campo magnético del rotor induce un EMF en el devanado no conectado. La tensión en esta fase cambia durante la rotación.
La señal del devanado del motor se divide en 4 etapas:
1. El devanado se conecta a 0
2. El devanado no está conectado
3. El devanado está conectado a la tensión de alimentación +
4. El devanado no está conectado
Comparando la señal de las fases con la señal de control, queda claro que el momento de transición al siguiente estado puede detectarse por la intersección del punto medio (la mitad de la tensión de alimentación) con la fase que no está conectada en ese momento (Figura 16).
Al detectar una intersección, es necesario hacer una pausa y encender el siguiente estado. Basándose en esta figura, se compiló un algoritmo para conmutar los estados devanados (Tabla 3).
| Estado actual | A | B | C | Estado siguiente |
| 1 | - | Esperando a que el punto medio cruce de + a - | + | 2 |
| 2 | Esperando a que el punto medio cruce de 1 a + | - | + | 3 |
| 3 | + | - | Esperando a que el punto medio cruce de + a - | 4 |
| 4 | + | Esperando a que el punto medio cruce de - a + | - | 5 |
| 5 | Esperando a que el punto medio cruce de + a - | + | - | 6 |
| 6 | - | + | Esperando a que el punto medio cruce de - a + | 1 |
La intersección del punto medio es más fácil de detectar con un comparador; la tensión del punto medio se suministra a una entrada del comparador, y el voltaje de la fase actual se suministra a la segunda.

El comparador se activa cuando el voltaje pasa por el punto medio y genera una señal para el microcontrolador.
Procesamiento de la señal de las fases del motor
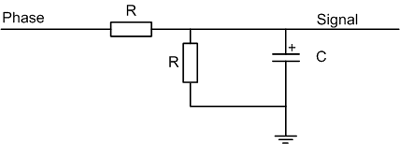
Sin embargo, la señal procedente de las fases al regular la velocidad PWM difiere en apariencia y tiene una naturaleza pulsante, en tal señal es imposible detectar la intersección con el punto medio. Por lo tanto, la señal debe ser filtrada con un filtro RC para obtener una curva envolvente, y también dividida de acuerdo a los requerimientos del comparador. A medida que aumenta el ciclo de trabajo, la señal PWM aumentará en amplitud.
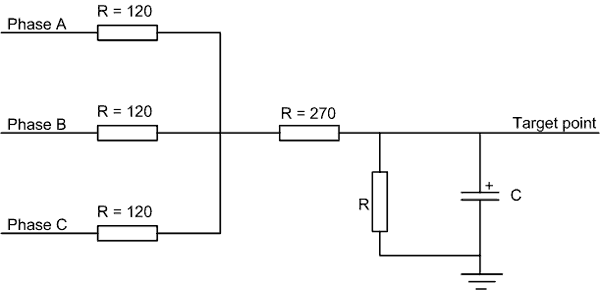
Cuando se utiliza un circuito con punto medio, las señales de las fases se reciben a través de resistencias limitadoras de corriente y se combinan.
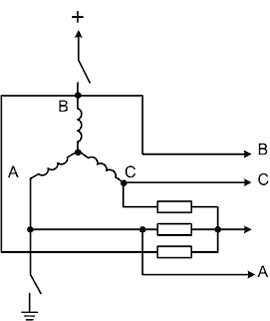
Debido al PWM, el voltaje del punto medio no es constante. También es necesario filtrar la señal. El voltaje de punto medio después de suavizar será bastante grande (alrededor de la tensión de alimentación del motor), debe ser dividido por un divisor de voltaje a la mitad de la voltaje de alimentación.
Después de que la señal pase por el filtro, las oscilaciones se suavizan y se obtiene una tensión plana con respecto a la cual se puede detectar la intersección del EMF posterior.
El punto medio cambiará su valor en función del voltaje (ciclo de trabajo PWM), así como la curva envolvente de la señal.
Las señales recibidas de los comparadores entran en el microcontrolador de control, que las procesa.
Sensores Hall vs BEMF
Un método sin sensores para determinar la posición del rotor basado en la FEM puede no funcionar bien en un cierto rango de velocidades de rotación bajas, donde la FEM es pequeña. En estos casos, todos los sistemas sin sensores más sencillos conmutan las fases "a ciegas", sin conocer la posición del rotor, suponiendo que el rotor seguirá la conmutación: un modo de funcionamiento paso a paso. Este método se utiliza con éxito en dispositivos como ventiladores o hélices de aeromodelismo, donde el par de carga es bajo a bajas velocidades. Si la carga es grande e inercial, este modo de control no es adecuado, ya que el par será inestable, el motor puede no arrancar en absoluto o puede salirse de sincronización. Si es necesario desarrollar el par máximo a bajas velocidades, es necesario aplicar un vector de corriente con la fase deseada relativa a la posición del rotor. En este caso, la opción de controlar un motor sin escobillas de CC utilizando sensores Hall es más preferible. Los sensores emiten una señal y proporcionan información sobre la posición del rotor a velocidad cero inclusive, por lo que el motor funciona inmediatamente en el modo de par de salida óptimo.
Puede elegir el motor sin escobillas de CC con sensores Hall que mejor se adapte a su proyecto en nuestro sitio web, en la sección
Motores DC brushless (BLDC)..
Los controladores de motores DC brushless para motores BLDC con sensores Hall están disponibles para su compra en nuestra tienda online shop.smd.ee