Controlador para motor paso a paso SMSD‑4.2CAN
Voltaje
12 - 48 VDC
Corriente de fase máxima
1.0 - 4.2 A
Fracción de paso
1/1 - 1/128
Métodos de control
CANOpen, STEP/DIR
Interfaces
CAN, USB
El controlador de motor paso a paso con una corriente de fase de salida de hasta 4.2 A está diseñado para funcionar bajo el control de un PLC utilizando el protocolo CANopen. SMSD‑4.2CAN proporciona control de velocidad y posición, así como una función de retorno a la posición cero. El controlador permite la conexión a un PC a través de USB. La parametrización se realiza mediante software libre. El controlador también admite el control de pulsos STEP/DIR.
Datos técnicos
Voltaje
12 – 48 VDC
Microstepping
1/1, 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128
Perfiles CANOpen
Control de posición, control de velocidad, homing
E/S discretas
4 entradas, 2 salidas
Parámetros STEP/DIR:
Máx. frecuencia de señal STEP
50 kHz
Duración mínima de la señal STEP
20 mks
Voltaje
12 – 48 VDC
Microstepping
1/1, 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128
Perfiles CANOpen
Control de posición, control de velocidad, homing
E/S discretas
4 entradas, 2 salidas
Parámetros STEP/DIR:
Máx. frecuencia de señal STEP
50 kHz
Duración mínima de la señal STEP
20 mks
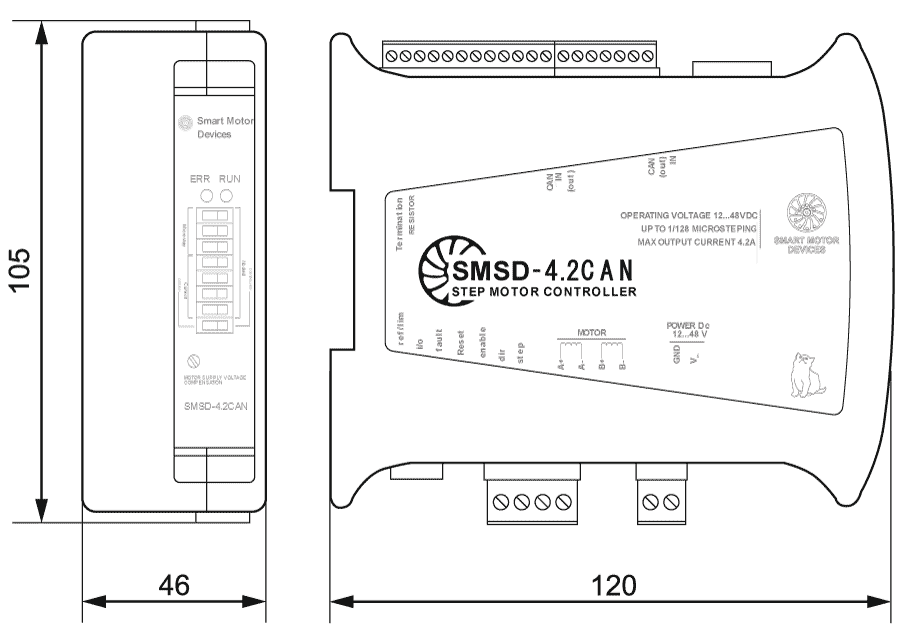
Dimensiones del controlador de motor paso a paso SMSD‑4.2CAN
Descripción del controlador de motor paso a paso SMSD‑4.2CAN
Funcionamiento suave del motor paso a paso con controlador SMSD‑4.2CAN
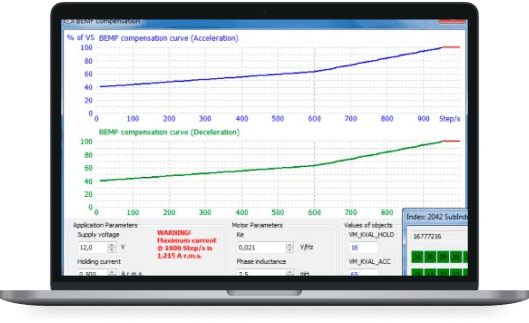
El controlador SMSD‑4.2CAN soporta dos modos de conmutación de motor: corriente y voltaje. En el modo de voltaje, los parámetros del motor se utilizan para calcular las características del voltaje. Este modo permite un movimiento más suave a bajas velocidades y dentro de un paso completo, en comparación con el modo de control actual.
Modos de control del controlador SMSD‑4.2CAN
El controlador SMSD‑4.2CAN soporta los siguientes perfiles según el protocolo CANopen:
- El modo de velocidad permite controlar la velocidad del motor paso a paso, así como los parámetros de aceleración y desaceleración;
- El modo de posicionamiento permite moverse a una coordenada determinada o a un desplazamiento determinado con los parámetros especificados de velocidad, aceleración y desaceleración;
- La función de inicio permite buscar la posición de inicio de varias maneras.
Además de controlar el motor paso a paso mediante el protocolo CANOpen, el controlador proporciona el control de posición del pulso con señales STEP/DIR estándar.
Conexión del controlador de motor paso a paso SMSD‑4.2CAN
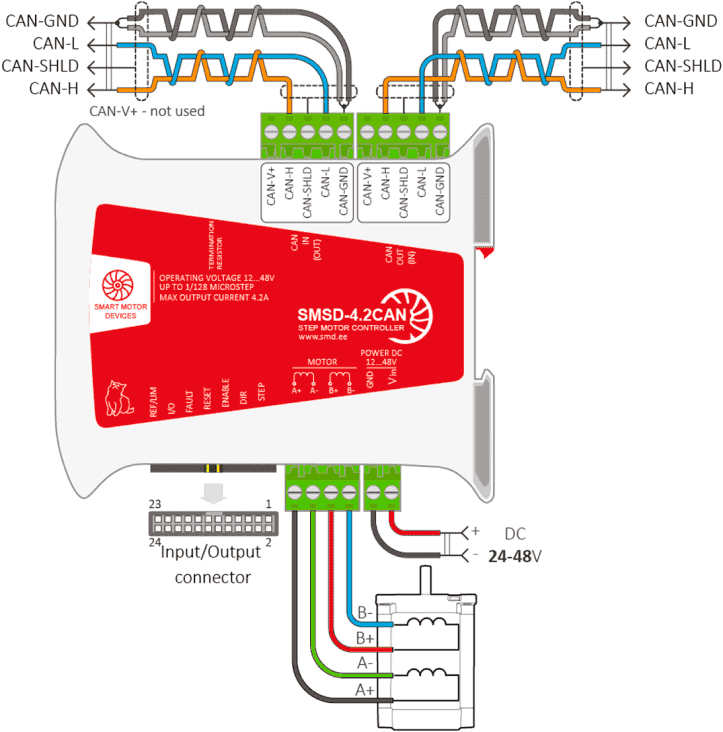
Diagrama de conexión del controlador SMSD‑4.2CAN
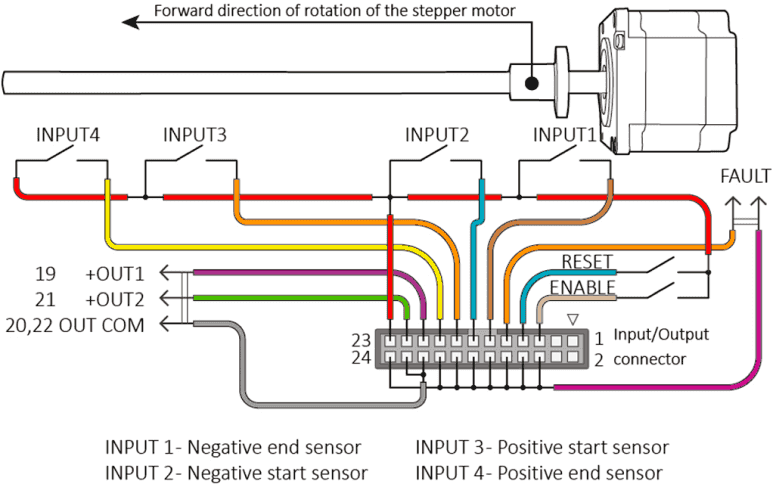
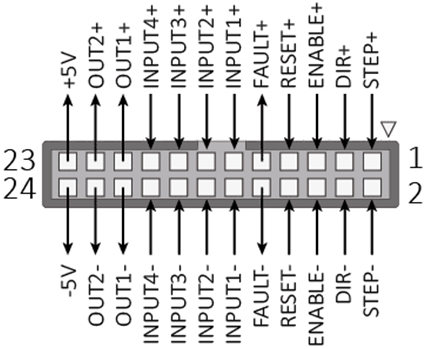
Conexión E/S del controlador SMSD‑4.2CAN
El controlador de motor paso a paso SMSD‑4.2CAN permite al usuario conectar hasta 4 sensores PNP para implementar varios algoritmos de operación para un motor paso a paso. Para trabajar con dispositivos externos, están disponibles dos salidas discretas controladas mediante el protocolo CANopen. La salida adicional FAULT es responsable de indicar el estado de alarma del controlador.
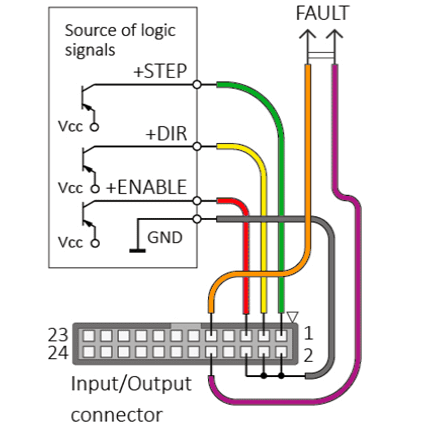
La configuración y ajuste de los parámetros del controlador para el modo de operación STEP/DIR se realiza a través del software configurador y posteriormente los ajustes se guardan en la ROM del dispositivo. El control del motor se realiza mediante el puerto I/O, los contactos STEP, DIR, ENABLE, RESET, FAULT. En este caso se puede redefinir la finalidad de algunos de ellos.
Software para controlador de motor paso a paso SMSD‑4.2CAN
Para los fines de configuración, depuración y prueba de funcionamiento del controlador, proporcionamos el software especial CANopen Builder. Este programa permite al usuario realizar la parametrización inicial de la conexión entre el controlador y el PLC, establecer unidades de medida personalizadas y factores de conversión, configurar el modo de control de voltaje tanto para motores preinstalados como para motores desconocido, guardar la configuración actual en el controlador y restablecer los valores predeterminados de fábrica, así como editar los valores de todos los elementos disponibles del diccionario de objetos del controlador del motor.