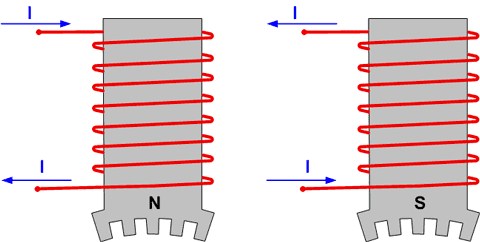
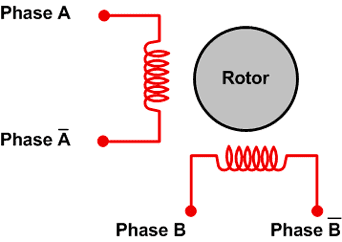
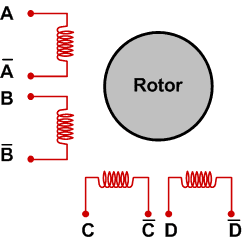
En sentido estricto, es más correcto decir que no es el motor paso a paso en sí el que es bipolar o unipolar, sino su conexión con el driver de control. Algunos motores tienen un devanado en cada fase, que el controlador debe invertir para cambiar la dirección del campo magnético. Este tipo de motor requiere un excitador de puente, o un excitador de medio puente con alimentación bipolar. En total, un motor de este tipo tiene dos devanados y, en consecuencia, cuatro terminales, por lo que sólo permite una opción de conexión: bipolar. Este tipo de motor puede denominarse motor paso a paso bipolar.
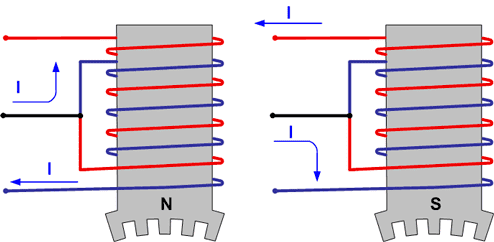
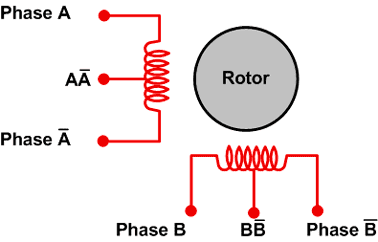
Un motor paso a paso unipolar también tiene un devanado en cada fase, pero se realiza una derivación desde la mitad del devanado. Esto permite cambiar la dirección del campo magnético creado por el devanado simplemente cambiando las mitades del devanado. Al mismo tiempo, el circuito del excitador se simplifica considerablemente. El driver sólo debe tener 4 teclas simples. Así, un motor unipolar utiliza un método diferente para cambiar la dirección del campo magnético. Los terminales centrales de los devanados pueden combinarse dentro del motor, por lo que un motor de este tipo puede tener 5 ó 6 terminales.
A veces, los motores paso a paso tienen 4 devanados separados. Cada devanado tiene terminales separados, por lo que hay 8 terminales en total. Con las conexiones de bobinado adecuadas, un motor de este tipo puede utilizarse como unipolar o bipolar. Un motor unipolar con dos devanados y derivaciones también puede utilizarse en modo bipolar si las derivaciones o los extremos de fase se dejan sin conectar.
El par producido por un motor paso a paso es proporcional a la magnitud del campo magnético creado por los devanados del estator. La forma de aumentar el campo magnético es aumentar la corriente o el número de vueltas de los devanados. Una limitación natural al aumentar la corriente de los devanados es el peligro de saturación del núcleo de hierro. Sin embargo, en la práctica esta restricción rara vez se aplica. Mucho más importante es la limitación del calentamiento del motor debido a las pérdidas óhmicas en los devanados. Este hecho demuestra una de las ventajas de la conexión bipolar de los motores paso a paso. Con una conexión de motor unipolar, sólo se utiliza la mitad de los devanados en un momento. La otra mitad simplemente ocupa espacio en la ventana del núcleo, lo que obliga a realizar los devanados con alambre de menor diámetro. Al mismo tiempo, con una conexión de motor bipolar todos los devanados están siempre en uso y funcionan de forma óptima. En este tipo de motores paso a paso, la sección transversal de cada devanado es el doble de grande y, en consecuencia, la resistencia óhmica es la mitad. Esto permite aumentar la corriente a la raíz del doble con las mismas pérdidas, lo que da una ganancia de par de aproximadamente el 40%. Si no se requiere un par mayor, la conexión de un motor unipolar permite reducir las dimensiones o simplemente funcionar con menores pérdidas. Los motores unipolares se siguen utilizando porque requieren circuitos de control del devanado mucho más sencillos.