El modo de funcionamiento de paso completo de un motor paso a paso puede implementarse de dos maneras.
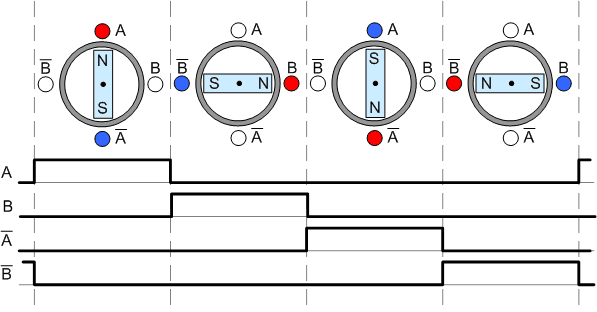
El primer método de control consiste en la conmutación alterna de fases. Las fases conmutadas no se solapan - sólo una fase se enciende a la vez. Este método se denomina «una fase encendida», paso completo o modo de accionamiento de onda. Los puntos de equilibrio del rotor para cada paso coinciden con los puntos de equilibrio «naturales» del rotor de un motor sin alimentación. La desventaja de este método de control es que sólo el 50% de los devanados se utilizan al mismo tiempo para una conexión bipolar, y sólo el 25% para una conexión unipolar del motor. Esto significa que no se puede obtener el par completo en este modo.
El segundo método es con control de superposición de fases: dos fases se encienden al mismo tiempo. Se denomina modo de paso completo «dos fases encendidas» o simplemente modo de paso completo. Con este método de control, el rotor se fija en posiciones intermedias entre los polos del estator. Y se proporciona aproximadamente un 40% más de par que en el caso de una sola fase encendida. Este método de control proporciona el mismo ángulo de paso que el primer método, pero la posición de los puntos de equilibrio del rotor se desplaza medio paso.
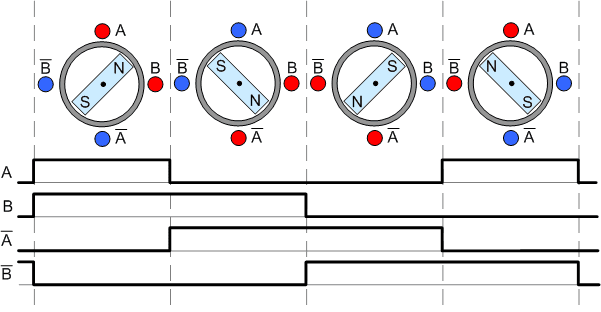
Las posiciones de los puntos de equilibrio del rotor se desplazan medio paso en el modo de paso completo con dos fases activadas. Hay que tener en cuenta que el rotor adopta estas posiciones cuando el motor está en marcha, pero la posición del rotor no puede permanecer invariable después de desconectar la corriente del devanado. Por lo tanto, al conectar y desconectar la corriente del motor, el rotor se desplazará medio paso. Para evitar que se desplace cuando está parado, es necesario suministrar una corriente de retención a los devanados. Lo mismo ocurre con los modos medio paso y los pasos micro. Debe tenerse en cuenta que si el rotor del motor estaba girando cuando el motor estaba apagado, entonces cuando se enciende, el rotor podría desplazarse más de medio paso.
La corriente de mantenimiento puede ser inferior a la corriente nominal, ya que un motor con rotor fijo no suele requerir mucho par. Sin embargo, hay aplicaciones en las que el motor debe proporcionar todo el par cuando está parado, lo que es posible para un motor paso a paso. Esta propiedad del motor paso a paso permite en tales situaciones prescindir de sistemas de frenado mecánico. Dado que los controladores de motores paso a paso modernos permiten regular la corriente de alimentación a los devanados del motor, el ajuste de la corriente de retención necesaria no suele ser un problema. La tarea suele consistir simplemente en proporcionar el soporte de software adecuado para el microcontrolador de control.