El par producido por un motor paso a paso depende de la velocidad, la corriente devanada y el circuito del excitador. La figura siguiente muestra la dependencia del par con el ángulo de rotación.
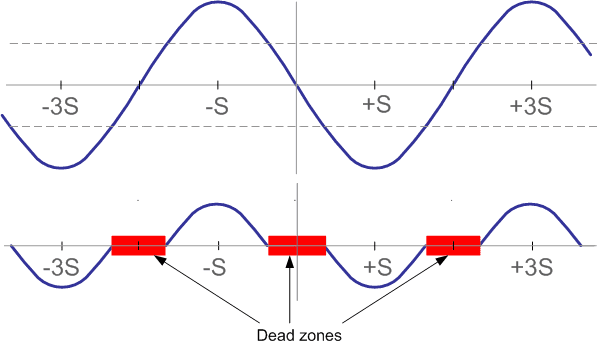
Para un motor paso a paso ideal, esta dependencia es sinusoidal. Los puntos S son las posiciones de equilibrio del rotor para un motor sin carga y corresponden a varios pasos sucesivos. Si se aplica al eje del motor un par externo inferior al par de retención, la posición angular del rotor cambiará en un determinado ángulo Φ.
Φ = (N / (2∙pi)) ∙ sin(Ta/Th),
Φ – desplazamiento angular,
N – número de pasos del motor por revolución,
Ta – par externo aplicado,
Th – par de retención.
El desplazamiento angular Φ es el error de posicionamiento del motor cargado. Si se aplica al eje del motor un par superior al par de retención, entonces el eje girará como resultado de la influencia de este par. La posición del rotor no está controlada En este modo.
En la práctica, siempre se aplica un par externo al motor. Al menos, porque el motor tiene que superar la fricción. Las fuerzas de fricción pueden dividirse en dos categorías: la fricción estática, que requiere un par constante para superarla, y la fricción dinámica o fricción viscosa, que depende de la velocidad.
Consideremos la fricción estática y supongamos que se requiere un par de la mitad del valor máximo para superar esta fricción. En la figura, las líneas discontinuas muestran el par de fricción. Por lo tanto, para que el rotor gire, sólo queda el par que se encuentra en el gráfico fuera de las líneas discontinuas. Esto lleva a dos conclusiones: la fricción reduce el par en el eje del motor y aparecen zonas muertas alrededor de cada posición de equilibrio del rotor:
d = 2 (S / (pi/2)) ∙ arcsin(Tf/Th) = (S / (pi/4)) ∙ arcsin(Tf/Th),
d – anchura de la zona muerta, radianes,
S – ángulo de paso, radianes,
Tf – par de fricción,
Th – par de retención.
Dead zones limit positioning accuracy. For example, the presence of static friction at half of the peak torque of the motor with step angle 90 degrees will cause dead zones of 60 degrees. This means that the motor step can fluctuate from 30 to 150 degrees, depending on the point of the dead zone where the rotor stopped after the next step.
The presence of dead zones is very important for microstepping. If, for example, there are dead zones of magnitude d, then a microstep of less than d will not move the rotor at all. Therefore, for systems using microstepping, it is very important to minimize static friction.
Cuando un motor funciona con carga, siempre se produce algún desplazamiento entre la posición angular del rotor y la orientación del campo magnético del estator. Una situación especialmente desfavorable es cuando el motor empieza a frenar y el par de carga se invierte. Debe tenerse en cuenta que el desfase o el adelanto sólo se refieren a la posición, no a la velocidad. En cualquier caso, si no se pierde el sincronismo del motor, este retraso o avance no puede superar los dos pasos completos. Este es un hecho muy agradable.
Cada vez que el motor paso a paso se mueve un paso, el rotor gira S radianes. El par mínimo se observa en los momentos en que el rotor se encuentra exactamente entre las posiciones de equilibrio adyacentes.
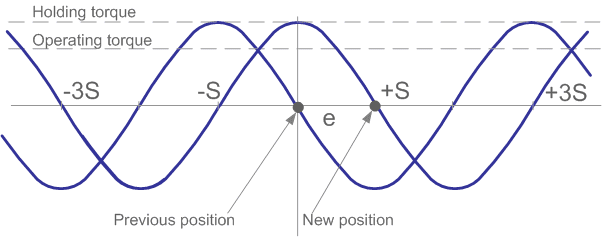
Este par se denomina par de funcionamiento, es decir, el par máximo que puede superar el motor cuando gira a baja velocidad. Con una dependencia sinusoidal del par respecto al ángulo de rotación del rotor, este par Tr = Th/20.5. Si el motor mueve un paso con dos devanados energizados, entonces el par de funcionamiento es igual al par de retención para un devanado energizado.
Los parámetros del accionamiento de un motor paso a paso dependen en gran medida de las características de la carga. Además de la fricción, una carga real tiene inercia. La inercia impide los cambios de velocidad. La carga inercial requiere que el motor produzca grandes pares durante la aceleración y la deceleración, limitando así la aceleración máxima. Por otro lado, aumentar la inercia de la carga aumenta la estabilidad de la velocidad.
Un parámetro del motor paso a paso como la dependencia del par respecto a la velocidad es el más importante a la hora de elegir el tipo de motor, elegir un método de control de fase y elegir un circuito excitador. Al diseñar controladores de motores paso a paso de alta velocidad, hay que tener en cuenta que los devanados del motor representan una inductancia. Esta inductancia determina el tiempo de subida y bajada de la corriente. Por lo tanto, si se aplica una tensión rectangular al devanado, la forma de la corriente no será rectangular. A bajas velocidades, el tiempo de subida y bajada de la corriente no afecta mucho al par, pero a altas velocidades el par disminuye. Esto se debe al hecho de que a altas velocidades la corriente en los devanados del motor no tiene tiempo de alcanzar el valor nominal.
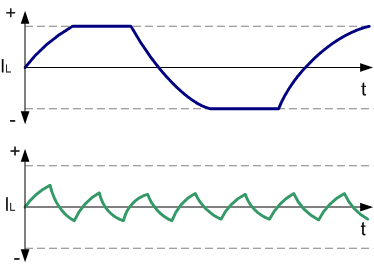
In order for the torque to drop as little as possible, it is necessary to ensure a high rate of current rise in the motor windings, which is achieved by using special circuits to power them.
El comportamiento del par al aumentar la frecuencia de conmutación de las fases es aproximadamente el siguiente: a partir de una determinada frecuencia, el par disminuye monotónicamente. Típicamente, para un motor paso a paso, se presentan dos curvas par‑velocidad:
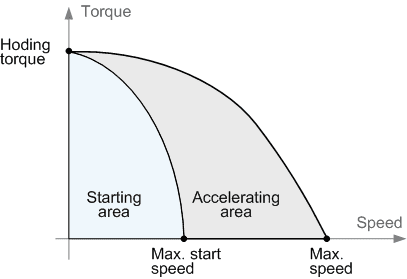
La curva interna (curva de arranque, o curva de arranque) muestra a qué par de fricción máximo para una velocidad dada es capaz de arrancar el motor paso a paso. Esta curva interseca el eje de velocidad en un punto llamado frecuencia máxima de arranque. Determina la velocidad máxima a la que un motor sin carga puede empezar a moverse. En la práctica, este valor se sitúa entre 200 y 500 pasos completos por segundo. La inercia de la carga influye mucho en el aspecto de la curva interna. Una mayor inercia corresponde a una menor área bajo la curva. Esta zona se denomina zona inicial. La curva exterior (curva de aceleración o curva de extracción) muestra a qué par de fricción máximo para una velocidad dada el motor paso a paso es capaz de mantener la rotación sin saltarse pasos. Esta curva interseca el eje de velocidad en un punto llamado frecuencia de aceleración máxima. Muestra la velocidad máxima para un motor dado sin carga. Al medir la velocidad máxima, tenga en cuenta que, debido al fenómeno de resonancia, el par también es cero en la frecuencia de resonancia. La región que se encuentra entre las curvas se denomina región de aceleración.