La implementación del diseño de motores paso a paso puede dividirse en tres versiones: motores paso a paso de reluctancia variable (VR), motores paso a paso de imán permanente (PM) y motores paso a paso híbridos. Estos tipos difieren en algunas características de rendimiento. Por ejemplo, el motor paso a paso VR no puede proporcionar ningún par de retención porque no tiene imanes. Los motores paso a paso VR hacen más ruido durante su funcionamiento. Pero estos motores tienen mejor par a velocidades más altas en comparación con los motores paso a paso PM. Los motores paso a paso híbridos combinan las características de los motores VR y PM y son los más utilizados actualmente.
Motores paso a paso de reluctancia variable (VR)
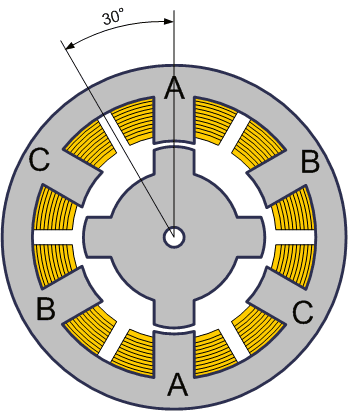
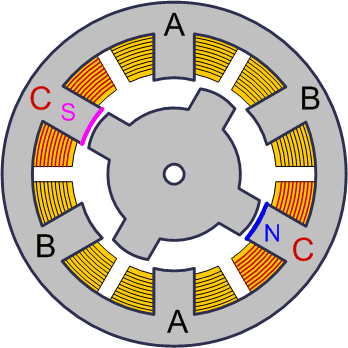
Los motores paso a paso VR tienen varios polos en el estator y un rotor en forma de piñón fabricado con material magnético blando. No hay magnetización del rotor. La imagen siguiente muestra un diseño simplificado: el rotor tiene 4 dientes y el estator 6 polos. El motor tiene 3 devanados independientes (A, B y C), cada uno de los cuales está devanado en dos polos opuestos del estator. Se trata de un motor con un paso de 30 grados.
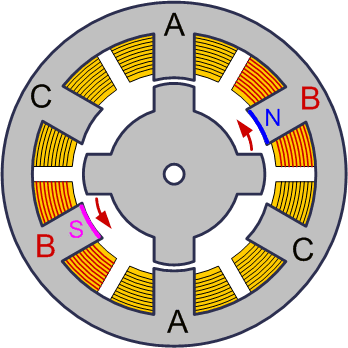
Cuando se excita uno de los devanados, el diente más próximo del rotor se desplaza para alinearse según el polo magnético del estator. En la imagen inferior, el rotor gira 30° en sentido antihorario cuando el devanado B está excitado. La rotación se detiene en el momento en que el rotor adopta la posición de reposo, alineado con el polo magnético.
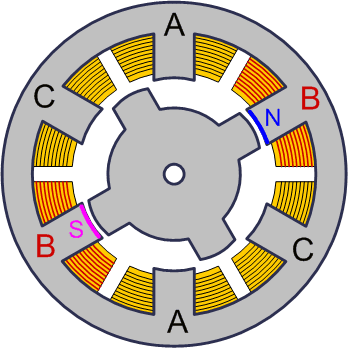
Así, cuando se conecta la corriente en uno de los devanados, el rotor tiende a tomar una posición en la que el flujo magnético está cerrado, es decir, los dientes del rotor estarán opuestos a los polos en los que se encuentra el devanado alimentado. Si entonces se apaga este devanado y se enciende el siguiente (como en la imagen inferior - la fase C está con corriente), el rotor cambiará de posición, cerrando de nuevo el flujo magnético con sus dientecillos.
Para realizar una rotación continua, es suficiente encender los devanados alternativamente. El motor no es sensible al sentido de la corriente en los devanados. Un motor real puede tener más polos en el estator y más dientes en el rotor, lo que corresponde a más pasos por revolución. A veces, la superficie de cada polo del estator está engranada, lo que, junto con los dientes del rotor correspondientes, proporciona un ángulo de paso muy pequeño, unos varios grados. Los motores de reluctancia variable rara vez se utilizan en aplicaciones industriales.
Motores paso a paso de imán permanente (PM)
Los motores paso a paso de imanes permanentes constan de un estator, que tiene devanados, y un rotor que contiene imanes permanentes. Los polos alternos del rotor tienen forma rectilínea y están situados en paralelo al eje del motor. Debido a la magnetización del rotor, estos motores proporcionan un mayor flujo magnético y, en consecuencia, un mayor par que los motores paso a paso de reluctancia variable.
El motor de la figura siguiente tiene 3 pares de polos en el rotor y 2 pares de polos en el estator. El motor tiene 2 devanados independientes, cada uno de los cuales está bobinado en dos polos opuestos del estator. Este motor, al igual que el motor paso a paso VR descrito anteriormente, tiene un tamaño de paso de 30 grados. Cuando se conecta la corriente en uno de los devanados, el rotor tiende a adoptar una posición en la que los polos opuestos del rotor y del estator están enfrentados. Para realizar una rotación continua, es necesario encender las fases alternativamente.
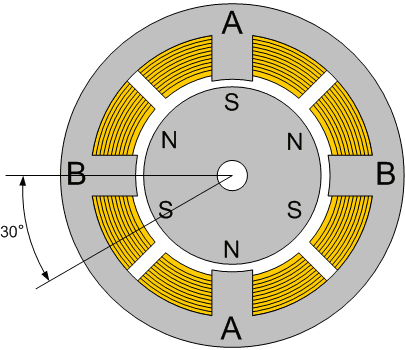
En la práctica, los motores paso a paso PM tienen 48 - 24 pasos por revolución o un ángulo de paso de 7,5 - 15 grados.
Motores paso a paso híbridos
Los motores paso a paso híbridos son más caros que los motores de imanes permanentes, pero tienen pasos más pequeños, mayor par y mayor velocidad. Los pasos por revolución típicos de un motor híbrido oscilan entre 100 y 400 (ángulo de paso de 3,6 a 0,9 grados). Los motores híbridos reúnen las mejores características de los motores paso a paso VR y PM.
El rotor de un motor paso a paso híbrido tiene dientes situados en dirección axial.
El rotor está dividido en dos partes, entre las cuales hay un imán permanente cilíndrico. Así, los dientes de la mitad superior del rotor son los polos norte, y los dientes de la mitad inferior son los polos sur. Además, las mitades superior e inferior del rotor giran entre sí la mitad del ángulo de paso de los dientes. El número de pares de polos del rotor es igual al número de dientes de una de sus mitades. Las piezas dentadas de los polos del rotor, al igual que el estator, se ensamblan a partir de placas separadas para reducir las pérdidas por corrientes parásitas.
El estator de un motor híbrido también tiene dientes, lo que supone un gran número de polos equivalentes frente a los polos principales en los que se encuentran los devanados. Normalmente se utilizan 4 polos principales para motores de 3,6 grados y 8 polos principales para motores de 1,8 y 0,9 grados. Los dientes del rotor ofrecen menos resistencia al circuito magnético en determinadas posiciones del rotor, lo que mejora el par estático y dinámico. Esto se consigue mediante la disposición adecuada de los dientes, cuando una parte de los dientes del rotor está estrictamente opuesta a los dientes del estator, y otra parte está entre ellos. La relación entre el número de polos del rotor, el número de polos equivalentes del estator y el número de fases determina el ángulo de paso S del motor:
S = 360 / (Nph ∙ Ph) = 360 / N,
Nph – número de polos equivalentes por fase = número de polos del rotor,
Ph – número de fases,
N – número total de polos para todas las fases juntas.
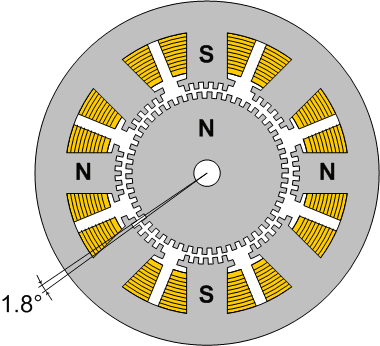
El rotor del motor mostrado en la figura anterior tiene 100 polos (50 pares), el motor tiene 2 fases, por lo que el número total de polos es de 200, y el paso, en consecuencia, es de 1,8 grados.
La sección longitudinal del motor paso a paso híbrido se muestra en la figura siguiente. Las flechas indican la dirección del flujo magnético del imán permanente del rotor. Parte del flujo (mostrado en la figura como una línea negra) pasa a través de los polos del rotor, los entrehierros y los polos del estator. Esta parte no interviene en la generación de par.
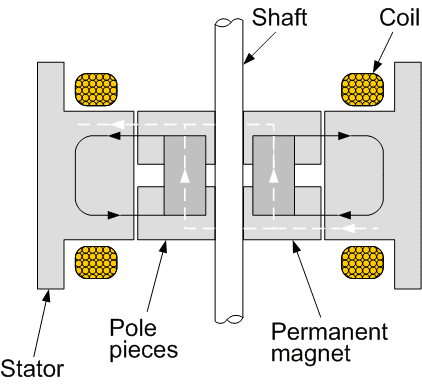
Los entrehierros de las piezas polares superior e inferior del rotor son diferentes. Esto se consigue girando las piezas polares la mitad del paso de los dientes. Por lo tanto, hay otro circuito magnético que contiene entrehierros mínimos y, como resultado, tiene una resistencia magnética mínima. Este circuito cierra otra parte del flujo (representado en la figura con una línea blanca discontinua), que genera par. Parte del circuito se encuentra en un plano perpendicular a la figura, por lo que no se muestra. El flujo magnético de la bobina del estator se crea en el mismo plano. En un motor híbrido, este flujo está parcialmente cerrado por los polos del rotor, y el imán permanente lo «ve» débilmente. Por lo tanto, a diferencia de los motores de corriente continua, el imán de un motor híbrido no puede desmagnetizarse con ningún nivel de corriente devanado.
La distancia entre los dientes del rotor y el estator es muy pequeña, normalmente de 0,1 mm. Esto requiere una alta precisión durante el montaje, por lo que no se recomienda desmontar un motor paso a paso, de lo contrario su vida útil puede terminar.
Para evitar que el flujo magnético se cierre a través del eje que pasa por el interior del imán, éste se fabrica con aceros no magnéticos.
Para obtener grandes pares, es necesario aumentar tanto el campo creado por el estator como el campo del imán permanente. Esto requiere un mayor diámetro del rotor, lo que empeora la relación par/inercia. Por ello, los motores paso a paso potentes se construyen a veces a partir de varias secciones en forma de pila. Esto permite que el par y el momento de inercia aumenten proporcionalmente al número de secciones, y su relación no empeora.
La mayoría de los motores paso a paso modernos son híbridos. En esencia, un motor híbrido es un motor de imanes permanentes, pero con un mayor número de polos. En cuanto al método de control, estos motores son idénticos. En la práctica, los motores suelen tener 100, 200 ó 400 pasos por revolución, respectivamente, el paso es de 3,6°, 1,8° ó 0,9°. La mayoría de los controladores permiten el half‑stepping o el microstepping, en los que este ángulo es menor.