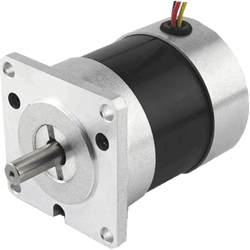
Controlador programable de motores BLDC BLSD‑20Modbus
Voltaje
24 – 48 VDC
Corriente nominal hasta
20 A
Corriente máxima
30 A
Métodos de control
RS-485 Modbus (velocidad o posición), control de velocidad analógico, movimiento preprogramado
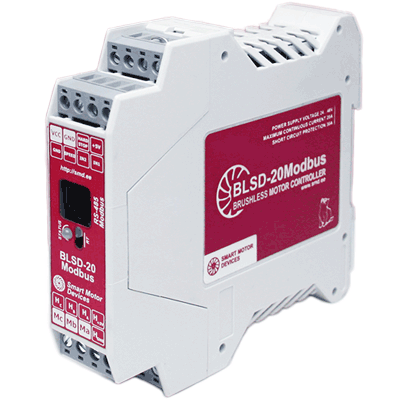
BLSD‑20Modbus está diseñado para controlar la velocidad o la posición del motor, proporciona capacidad de retener y limitar la corriente del motor. El controlador puede funcionar de forma autónoma o utilizarse como dispositivo secundario en la red RS-485. El protocolo Modbus ASCII/RTU se utiliza para programar, configurar parámetros operativos y monitorear el estado del motor.
Datos técnicos
Corriente de salida continua, ajustable
1 – 20 A
Corriente máxima
30 A
Interface de comunicación
RS-485, Modbus (ASCII o RTU)
Entradas IN1, IN2:
Máx. resistencia de contactos cerrados
4.7 kOhm
Designación
Programable, START/STOP o DIRECTION
Entrada SPEED:
Resistencia
20 kOhm
Rango de voltaje de entrada de SPEED
0...5 VDC
Designación
Control de velocidad analógico
Corriente de salida continua, ajustable
1 – 20 A
Corriente máxima
30 A
Interface de comunicación
RS-485, Modbus (ASCII o RTU)
Entradas IN1, IN2:
Máx. resistencia de contactos cerrados
4.7 kOhm
Designación
Programable, START/STOP o DIRECTION
Entrada SPEED:
Resistencia
20 kOhm
Rango de voltaje de entrada de SPEED
0...5 VDC
Designación
Control de velocidad analógico
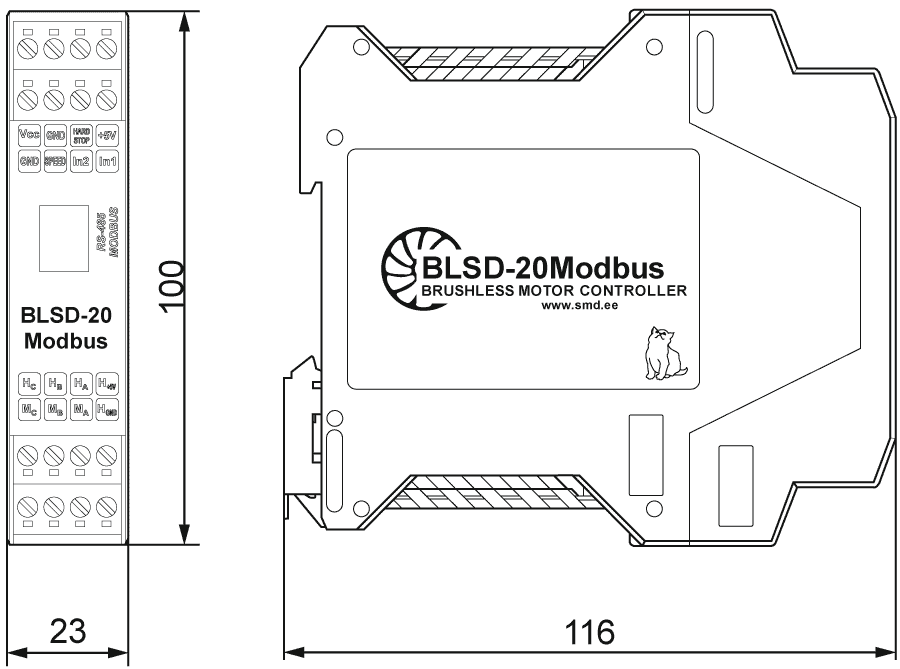
Dimensiones del controlador de motor DC sin escobillas BLSD‑20Modbus
Descripción del controlador de motor DC sin escobillas BLSD‑20Modbus
Funciones y características del controlador
El dispositivo se controla a través de la interfaz RS-485, protocolo Modbus RTU o ASCII, o mediante señales externas aplicadas a las entradas del controlador. El controlador proporciona las siguientes funciones y capacidades:
- control de velocidad y posición de un motor BLDC con sensores Hall;
- estabilización de velocidad de un motor sin escobillas basada en datos de sensores Hall;
- control de cuatro cuadrantes de un motor sin escobillas;
- ajuste de velocidad mediante Modbus o señal analógica externa;
- asignación de valores de aceleración y desaceleración;
- programación del algoritmo de funcionamiento del motor, inicio del programa de control del usuario mediante comando vía Modbus o automáticamente cuando se enciende el variador;
- programación de las entradas IN1 e IN2, que también pueden utilizarse como señales de REVERSE/DIRECTION y REVERSE/DIRECTION;
- selección de la lógica de funcionamiento de las señales de entrada IN1 e IN2 (START/STOP y REVERS) – disparo en el flanco delantero o nivel de señal;
- posicionamiento en una coordenada determinada o un desplazamiento en un valor determinado según los datos de los sensores Hall dentro del rango de – 2 147 483 647 a + 2 147 483 647 conmutación del sensor Hall.
Métodos de control:
- funcionamiento autónomo según un programa de control de usuario previamente grabado en la memoria;
- control desde PC o PLC mediante protocolo Modbus;
- modo combinado: ejecución del algoritmo de operación especificado y ejecución de comandos transmitidos a través de Modbus;
- control de velocidad mediante señal analógica externa 0...5 V o potenciómetro.
Conexión del controlador de motor DC sin escobillas BLSD‑20Modbus
Para corrientes altas, se recomienda colocar la fuente de alimentación muy cerca del controlador y utilizar tanto líneas de suministro como terminales de fase.
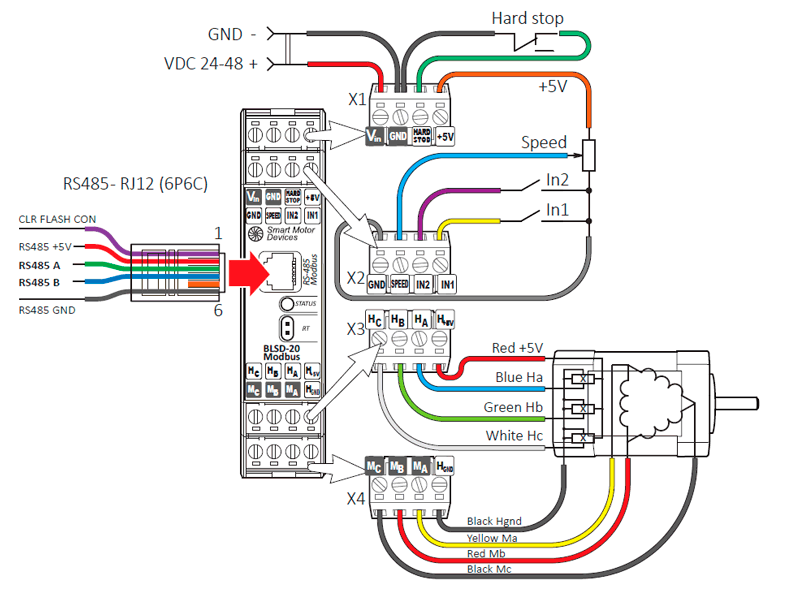
Cableado general del controlador de motor sin escobillas BLSD‑20Modbus
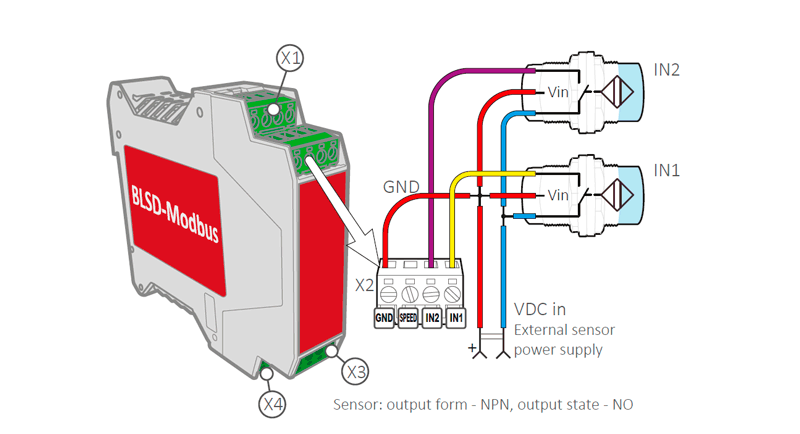
Un ejemplo de conexión de sensores a las entradas del controlador de motor sin escobillas BLSD‑20Modbus
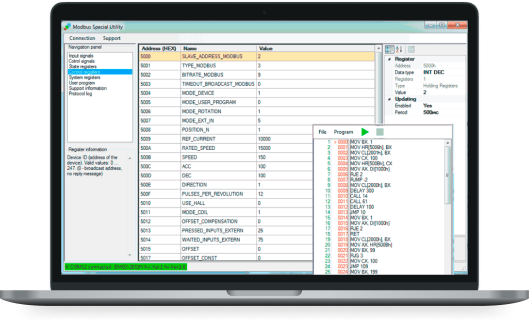
Software y parametrización de controlador BLSD‑20Modbus
El funcionamiento del controlador se configura mediante registros, que se pueden cambiar mediante RS-485 Modbus. Para configurar el dispositivo y controlar los parámetros durante el funcionamiento, puede utilizar el software Modbus Special Utility o utilizar otros programas que proporcionen intercambio de datos a través del protocolo Modbus.
Programación del controlador BLDC BLSD‑20Modbus
Los controladores BLSD‑20Modbus son programables y pueden funcionar según un programa de usuario previamente grabado en la memoria FLASH. Los programas de control tienen una longitud máxima de 1024 instrucciones.
El software Modbus Special Utility se puede utilizar para componer, editar, leer desde la memoria y escribir en la memoria del programa. Cuando se trabaja con la utilidad especial Modbus, los programas de control se pueden guardar en un archivo o leer desde un archivo. El archivo contiene una lista de instrucciones con parámetros y comentarios. El programa del controlador puede contener una secuencia lineal de comandos para la ejecución, se pueden usar ciclos, temporizadores de espera, transiciones condicionales e incondicionales, relativas y absolutas, y se proporciona el uso de subrutinas.
El sistema de comando más simple permite al usuario componer algoritmos de control de motores en forma de una secuencia de instrucciones para ejecutar. La longitud máxima del programa es 1024 instrucciones.
Hay 10 registros del sistema para trabajar con datos, almacenar información intermedia y organizar saltos condicionales.
El sistema de comando incluye los siguientes tipos de instrucciones:
- Instrucciones para escribir un valor en un registro. Las operaciones de 16 y 32 bits están disponibles para los usuarios;
- Los comandos de comparación y salto condicional permiten implementar ramas del programa;
- Los comandos de salto incondicional permiten saltar incondicionalmente a una instrucción de programa específica;
- Se proporcionan instrucciones para llamar a subrutinas para acortar y aligerar el código del programa;
- Instrucciones para organizar ciclos: ejecución cíclica de una secuencia de comandos;
- Instrucciones para organizar un retraso;
- Operaciones matemáticas: suma, resta, división y multiplicación;
- Operaciones lógicas;
- Operaciones de turno.