Driver de motor paso a paso SMD‑4.2 PCB abierta
Voltaje
12 – 48 VDC
Corriente de fase máxima
2.7 - 4.2 А
Fracción de paso
1/1 - 1/256
Métodos de control
Entrada analógica, STEP/DIR
Versión
PCB abierta sin carcasa
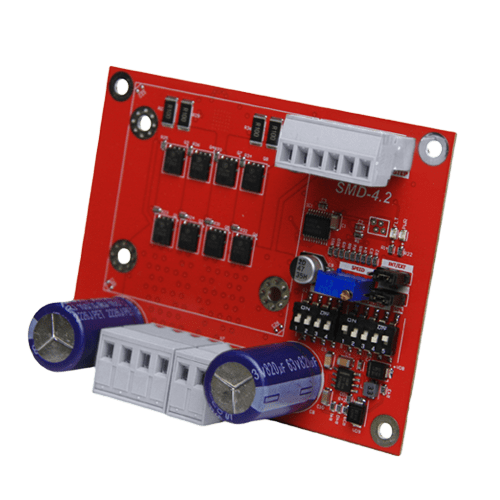
El driver de motor paso a paso SMD‑4.2 se fabrica en un diseño sin caja, en forma de PCB abierta con orificios de montaje. También hay una versión de driver con una abrazadera DIN. El driver funciona con micropasos de hasta 1/256 y proporciona un alto par.
Datos técnicos
Entradas STEP, DIR, ENABLE:
Nivel de alto voltaje
5 - 12 VDC o 24 VDC
Nivel de voltaje bajo
0 - 1 VDC
Frecuencia máxima de señal de pulso STEP
200 kHz
Entrada velosidad:
Rango de voltaje de la señal analógica de control
0.1 – 10 VDC
Impedancia de entrada
30 Ohm
Corriente de entrada
1 mA
Entradas STEP, DIR, ENABLE:
Nivel de alto voltaje
5 - 12 VDC o 24 VDC
Nivel de voltaje bajo
0 - 1 VDC
Frecuencia máxima de señal de pulso STEP
200 kHz
Entrada velosidad:
Rango de voltaje de la señal analógica de control
0.1 – 10 VDC
Impedancia de entrada
30 Ohm
Corriente de entrada
1 mA
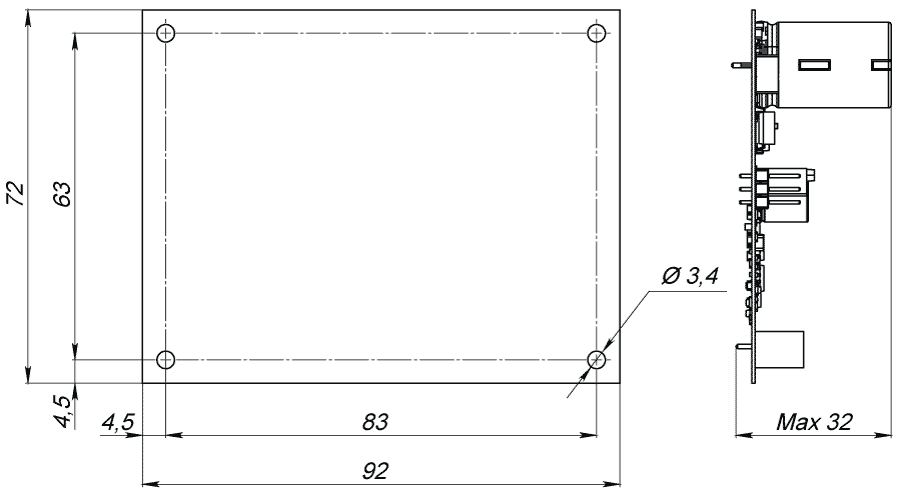
Dimensiones del driver de motor paso a paso SMD‑4.2 PCB abierta
Descripción del driver de motor paso a paso SMD‑4.2 PCB abierta
El driver de motor paso a paso SMD‑4.2 se fabrica en un diseño sin caja, en forma de PCB abierta con orificios de montaje. También hay una versión de driver con una abrazadera DIN. El driver compacto y liviano es de tamaño pequeño y no requiere mucho espacio en el sitio de instalación. El funcionamiento del motor paso a paso con driver SMD‑4.2 se caracteriza por una baja vibración y ruido. El driver funciona con micropasos de hasta 1/256 y proporciona un alto par.
Métodos de control del driver de motor paso a paso SMD‑4.2 PCB abierta
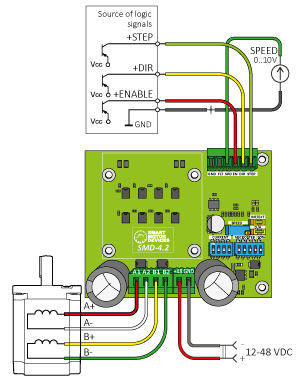
- Control de posición de pulso
El control de posición de impulsos del motor paso a paso lo proporcionan las señales lógicas estándar STEP/DIR y ENABLE. - Control de velocidad analógico
El control de velocidad del motor paso a paso analógico se puede realizar de dos maneras: - señal de voltaje externa 0 - 10 VDC;
- potenciómetro incorporado.
Conexión del driver de motor paso a paso SMD‑4.2 PCB abierta
Descargas
Solicitar el precio
Querido invitado
Gracias por tu mensaje!
Nos pondremos en contacto con usted tan pronto como sea posible.
Querido invitado
Algo va mal.
Por favor intente mas tarde.