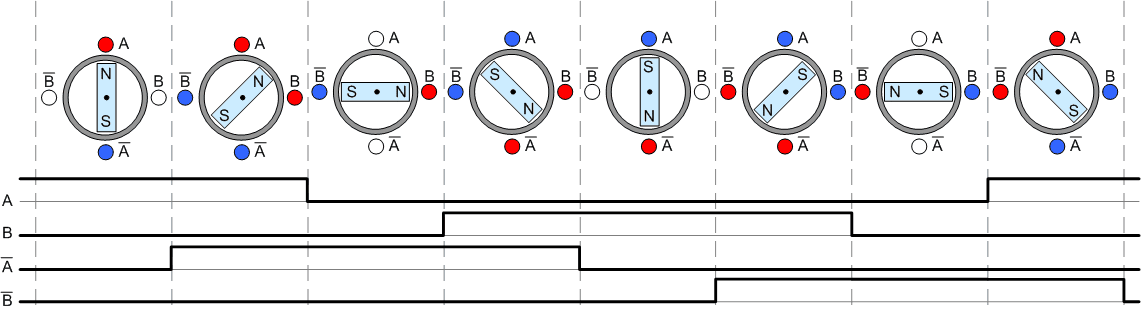
El modo de medio paso es una combinación de «uno y dos pasos», cuando el rotor se mueve la mitad del paso principal. Este método de control es bastante común ya que un motor paso a paso de menor ángulo de paso cuesta más y es una buena ventaja obtener 400 pasos por revolución en lugar de 200 del mismo motor. Durante la operación de medio paso, sólo una de las fases se alimenta cada segundo paso, y en otros casos se alimentan dos fases. Como resultado, el movimiento angular del rotor es la mitad del ángulo de paso para los dos primeros métodos de control (véase el artículo de control de paso completo). Además de reducir el tamaño del paso, este método de control permite deshacerse parcialmente del fenómeno de resonancia. El modo de funcionamiento de medio paso no suele proporcionar el par completo, aunque los controladores más avanzados implementan un modo de control de medio paso modificado en el que el motor proporciona casi el par completo sin disipar más potencia de la nominal.
La dependencia del par con el ángulo de giro del rotor respecto al punto de equilibrio es aproximadamente sinusoidal para un motor paso a paso con un devanado excitado. Esta dependencia para un motor paso a paso de dos devanados, que tiene N pasos por revolución (ángulo de paso en radianes S=(2∙pi)/N), se muestra en la siguiente figura.
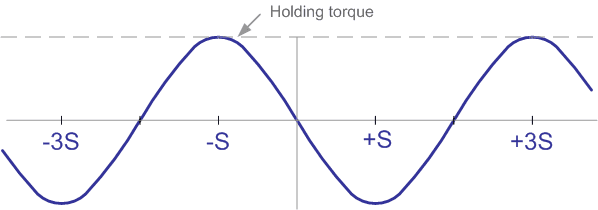
De hecho, la dependencia puede ser diferente. Esto se explica por la geometría no ideal del rotor y el estator del motor. El valor máximo del par se denomina par de retención. La fórmula que describe la dependencia del par con el ángulo de rotación del rotor es la siguiente:
T = - Th ∙ sin( ((pi/2) / S) ∙ Ф ),
T – par,
Th – par de retención,
S – ángulo de paso,
Φ – ángulo de rotación del rotor.
Si se aplica al rotor un par externo superior al par de retención, el rotor girará. Si el par externo no supera el par de retención, el rotor estará en equilibrio dentro del ángulo de paso. Debe tenerse en cuenta que para un motor sin corriente el par de retención no es cero debido a la acción de los imanes permanentes del rotor. Este par suele ser aproximadamente el 10% del par máximo proporcionado por el motor.
A veces se utilizan los términos «ángulo mecánico del rotor» y «ángulo eléctrico del rotor». El ángulo mecánico se calcula basándose en el hecho de que una rotación completa del rotor es de 2∙pi radianes. Al calcular el ángulo eléctrico, se supone que una revolución corresponde a un periodo de la dependencia angular del par. Para las fórmulas anteriores, Φ es el ángulo de rotación mecánica del rotor, y el ángulo eléctrico para un motor paso a paso que tiene 4 pasos en el período de la curva de par es igual a ((pi/2)/S)∙Ф o (N/4)∙Φ, donde N es el número de pasos por revolución. El ángulo eléctrico determina en realidad el ángulo de rotación del campo magnético del estator y nos permite construir una teoría independiente del número de pasos por revolución para un motor en particular.
Si se accionan simultáneamente dos devanados del motor, el par será igual a la suma de los pares proporcionados por los devanados por separado.
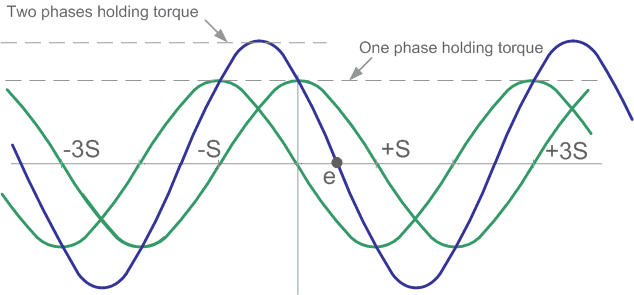
Si las corrientes en los devanados son las mismas, el punto de par máximo se desplazará la mitad del escalón. El punto de equilibrio del rotor (punto e en la figura) también se desplazará la mitad del escalón. Este hecho constituye la base para la aplicación del modo de medio paso. El valor máximo del par (par de retención) será la raíz de dos veces mayor que con un devanado accionado.
Th2 = 20.5 ∙ Th1,
Th2 – par de retención con dos devanados activados,
Th1 – par de retención con un devanado activado.
Este momento suele indicarse en las características de un motor paso a paso.
La magnitud y la dirección del campo magnético se muestran en el diagrama vectorial de la figura siguiente.
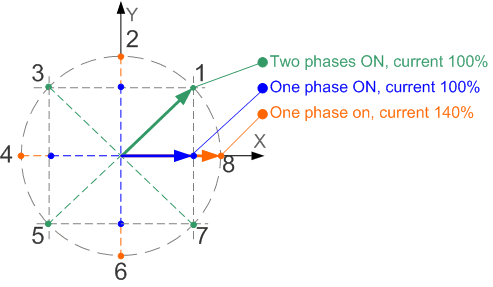
Los ejes X e Y coinciden con la dirección del campo magnético creado por los devanados de la primera y segunda fases del motor. Cuando el motor funciona con una fase encendida, el rotor puede tomar las posiciones 1, 3, 5, 7. Si las dos fases están encendidas, el rotor puede tomar las posiciones 2, 4, 6, 8. Además, en este modo hay más par, ya que es proporcional a la longitud del vector de la figura. Ambos métodos de control proporcionan un paso completo, pero las posiciones de equilibrio del rotor se desplazan medio paso. Si se combinan estos dos métodos y se aplican secuencias adecuadas de impulsos a los devanados, es posible forzar al rotor a tomar secuencialmente las posiciones 1, 2, 3, 4, 5, 6, 7, 8, lo que corresponde a medio paso.
En comparación con el modo de paso completo, el modo de medio paso presenta las siguientes ventajas:
- mayor resolución sin necesidad de utilizar motores más caros,
- menos problemas con el fenómeno de la resonancia. La resonancia sólo provoca una pérdida parcial de par, que no suele interferir en el funcionamiento normal del accionamiento.
La desventaja del modo de medio paso es que el par fluctúa bastante de un paso a otro. En las posiciones del rotor en las que se activa una fase, el par es aproximadamente el 70% del par total cuando se activan dos fases. Estas fluctuaciones pueden provocar un aumento de las vibraciones y el ruido, aunque siguen siendo menores que en el modo de paso completo.
Una forma de eliminar las fluctuaciones de par es aumentar el par en las posiciones con una fase conectada y garantizar así el mismo par en todas las posiciones del rotor. Esto puede conseguirse aumentando la corriente en estas posiciones hasta aproximadamente el 141% de la corriente nominal. Hay que tener en cuenta que el valor del 141% es teórico, por lo que, en aplicaciones que requieran una gran precisión en el mantenimiento del par, este valor debe seleccionarse experimentalmente para una velocidad y un modelo de motor concretos. Dado que la corriente sólo aumenta cuando una fase está encendida, la potencia disipada es igual a la potencia de paso completo al 100% de la corriente nominal. Sin embargo, tal aumento de la corriente requiere una tensión de alimentación más elevada, lo que no siempre es posible.
También hay otra forma. Para eliminar las fluctuaciones de par cuando el motor funciona en modo de medio paso, es posible reducir la corriente en los momentos en que se encienden dos fases. Para obtener un par constante, esta corriente debe ser el 70,7% de la corriente nominal.
En el modo de medio paso, la transición a un estado con una fase desactivada es muy importante. Para forzar el rotor a la posición adecuada, la corriente en la fase apagada debe reducirse a cero lo más rápidamente posible. La duración de la disminución de la corriente depende del voltaje en el devanado en el momento en que pierde su energía almacenada. Poniendo en cortocircuito el devanado en ese momento con la fuente de alimentación, que representa la tensión máxima disponible en el sistema, se garantiza la disminución más rápida posible de la corriente. Para obtener una rápida disminución de la corriente al alimentar los devanados del motor con un puente H, todos los transistores deben estar apagados, mientras que el devanado a través de diodos está conectado a la fuente de alimentación. La velocidad de decaimiento de la corriente se reducirá considerablemente si se deja abierto un transistor del puente y se cortocircuita el devanado a través del transistor y el diodo.
Para aumentar la velocidad de decaimiento de la corriente cuando se controlan motores unipolares, es preferible suprimir las sobretensiones EMF de autoinducción no con diodos, sino con varistores o una combinación de diodos y un diodo zener, que limitará la sobretensión a un nivel superior pero seguro para los transistores.
La corriente de mantenimiento puede ser inferior a la nominal, ya que un motor con rotor fijo no suele requerir mucho par. Sin embargo, hay aplicaciones en las que el motor debe proporcionar todo el par cuando está parado, lo que es posible para un motor paso a paso. Esta propiedad del motor paso a paso permite en tales situaciones prescindir de sistemas de frenado mecánico. Dado que los controladores de motores paso a paso modernos permiten regular la corriente a los devanados del motor, el ajuste de la corriente de retención necesaria no suele ser un problema. La tarea suele consistir simplemente en proporcionar el soporte de software adecuado para el microcontrolador de control.