Los motores de corriente continua con escobillas se caracterizan por su bajo costo, simplicidad de diseño y facilidad de operación. Estas características permiten que dichos motores sigan siendo una opción económica y uno de los tipos de accionamiento eléctrico más comunes. Sin embargo, las desventajas conocidas de los motores con escobillas (vida útil limitada debido a las altas corrientes de arranque y la dependencia de la velocidad con respecto a la carga) limitan sus capacidades y áreas de aplicación. Para superar estas deficiencias y conservar las ventajas de los motores con escobillas, la empresa Smart Motor Devices desarrolló un nuevo dispositivo, el BMD‑12 - un controlador para motores con escobillas que incluye funciones de estabilización de velocidad, arranque y parada suave ajustables, y limitación de corriente del motor. El BMD‑12 es un regulador PID completo y permite compensar las variaciones de carga y las fluctuaciones de velocidad, a diferencia de los dispositivos basados en la compensación de carga RxI.
El controlador BMD‑12 proporciona:
- regulación de la velocidad del motor con escobillas;
- compensación de la carga y estabilización de la velocidad del motor sin encoder;
- arranque y parada suaves ajustables del motor;
- un controlador PID completo para lograr un funcionamiento óptimo con cualquier tipo de motor y carga.
Compensación de carga y estabilización de la velocidad basada en la fuerza electromotriz (BEMF) de contrafase del motor.
En los controladores BMD‑12, la estabilización de la velocidad se implementa sobre la base de la fuerza electromotriz de contrafase del motor, ya que este método es el más óptimo tanto en términos de costo del sistema final como en los parámetros de funcionamiento del motor.
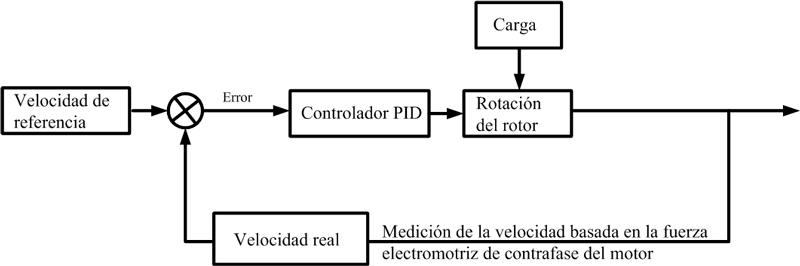
Se sabe que la velocidad de rotación del eje de un motor de corriente continua con escobillas depende de la magnitud del par de carga. Para estabilizar la velocidad al cambiar la carga, se requiere un controlador externo y un sistema de retroalimentación que permita detectar el cambio, corregir la acción de control y estabilizar la velocidad de rotación.
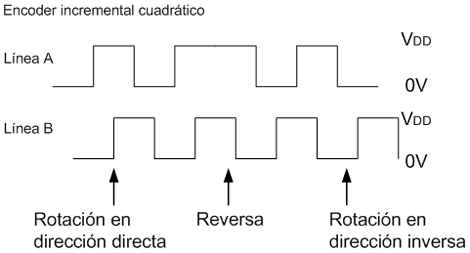
Existen varias opciones de retroalimentación que pueden utilizarse para resolver el problema de estabilización de la velocidad: retroalimentación por corriente, por encoder externo y por fuerza electromotriz del motor.
1. A menudo, se utilizan datos del encoder (resolutor, tacogenerador) como retroalimentación, que se monta directamente en el motor. Los datos del encoder son procesados por el microcontrolador del controlador externo, y el error de velocidad calculado se compensa mediante el cambio de la acción de control. Sin embargo, este enfoque, al eliminar un problema – la oscilación de la velocidad al cambiar la carga – añade otro: la complejidad y el aumento de costo del sistema. Por lo tanto, la retroalimentación basada en datos del encoder es más justificada y se utiliza en sistemas donde se requiere posicionamiento o se necesita información sobre la posición actual del eje.
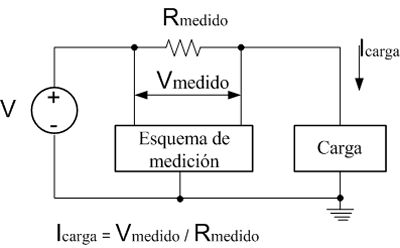
2. La retroalimentación por corriente se utiliza a menudo en sistemas económicos, donde se requiere un mantenimiento aproximado de las revoluciones de salida, pero no hay requisitos estrictos sobre el valor real de la velocidad y el tiempo de respuesta del accionamiento a los cambios de carga. Ejemplos característicos son las máquinas de coser domésticas, herramientas eléctricas para el hogar (taladros, atornilladores) y electrodomésticos de cocina (batidoras, picadoras de carne, etc.). El principio de control se basa en el seguimiento de los cambios de carga, y la estabilización de la velocidad se realiza de forma secundaria. Debido a los procesos oscilatorios de este sistema, la estabilización de la velocidad se lleva a cabo con un retraso, siendo inevitables los tirones y sacudidas al cambiar la carga. Otro inconveniente significativo de estos dispositivos es la necesidad de ajuste manual de cada unidad con un motor específico. Durante el proceso de ajuste, es necesario no solo regular la velocidad, sino también simular la carga en el motor. En este caso, el nivel de compensación se selecciona empíricamente (generalmente de forma manual, utilizando una perilla de potenciómetro o un resistor ajustable) basándose en los resultados de la carga de prueba. Si durante la operación la velocidad de trabajo o la carga difieren significativamente de las condiciones de prueba, la calidad de la estabilización de la velocidad será inferior.
3. La estabilización de la velocidad basada en la fuerza electromotriz (FEM) del motor es la opción óptima para sistemas industriales que utilizan motores sin encoder. Por un lado, el sistema resulta económico, ya que puede emplearse con motores sin encoder. Por otro lado, no hay necesidad de realizar un ajuste inicial, como ocurre con la retroalimentación por corriente. Al estabilizar la velocidad basada en la FEM, el controlador supervisa específicamente la velocidad del motor, y la corrección se realiza más rápidamente; al cambiar la carga, no se producen tirones ni oscilaciones automáticas, que son características de los dispositivos con retroalimentación por corriente.
Controlador PID completo
Los requisitos de precisión para mantener las revoluciones y la velocidad de estabilización dependen de la tarea específica y pueden variar considerablemente. Los motores de diferentes modelos presentan características distintas y responden de diferentes maneras a los cambios de carga y a la compensación de la velocidad. Además, la propia naturaleza de la carga puede tener diferentes parámetros (inercia, ciclicidad, variación en el tiempo).
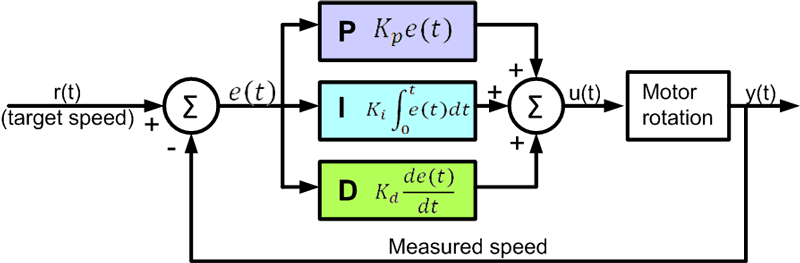
Para adaptar cualquier modelo de motor a tareas con altos requisitos de precisión en el mantenimiento de la velocidad y configurarlo para trabajar con carga variable, los controladores BMD‑12 implementan un controlador PID completo, cuyos coeficientes son editables.
La modificación del coeficiente proporcional permite ajustar el tiempo de reacción del accionamiento ante cambios de carga y velocidad, así como reducir el tamaño del error constante. El coeficiente integral permite eliminar el error de velocidad establecido, mientras que el componente diferencial elimina las oscilaciones del sistema. Así, el controlador con un regulador PID permite lograr un funcionamiento suave del accionamiento a velocidad constante, sin tirones al cambiar la carga en el eje del motor.