Controlador integrado de motor CC cepillado BMD‑12
Voltaje
12 – 24 VDC
Corriente nominal hasta
12 A
Método de estabilización de velocidad
BEMF
Métodos de control
Control de velocidad (potenciómetro o vía PC)
El BMD‑12 es un controlador de velocidad integrado para motores de CC. El controlador proporciona compensación de carga y estabilización de la velocidad de rotación sin un encóder basado en el EMF posterior del motor. El BMD‑12 está equipado con un controlador PID con todas las funciones. Los ajustes independientes de los coeficientes PID permiten obtener un funcionamiento ideal del accionamiento para cualquier velocidad y carga.
Datos técnicos
Voltaje
12 – 24 VDC
Rango de ajuste del límite de corriente
0.5 – 12 A
Protección contra cortocircuitos (no se requiere fusible externo)
5.5 – 17 А, 55 μs
Potencia del motor
hasta 300 W
Frecuencia PWM del motor
18 kHz
Interface de comunicación
USB
Voltaje
12 – 24 VDC
Rango de ajuste del límite de corriente
0.5 – 12 A
Protección contra cortocircuitos (no se requiere fusible externo)
5.5 – 17 А, 55 μs
Potencia del motor
hasta 300 W
Frecuencia PWM del motor
18 kHz
Interface de comunicación
USB
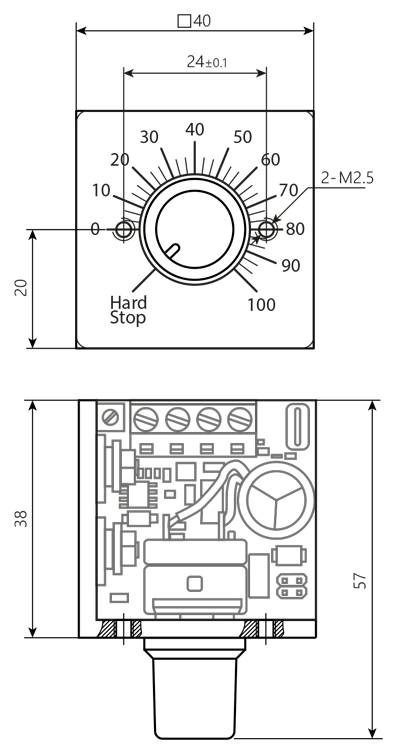
Dimensiones e instalación del controlador integrado de motor CC cepillado BMD‑12
Descripción del controlador integrado de motor CC cepillado BMD‑12
BMD‑12 está diseñado para el control de velocidad y estabilización de un motor sin encóder. El límite de corriente ajustable proporciona protección contra sobrecargas.
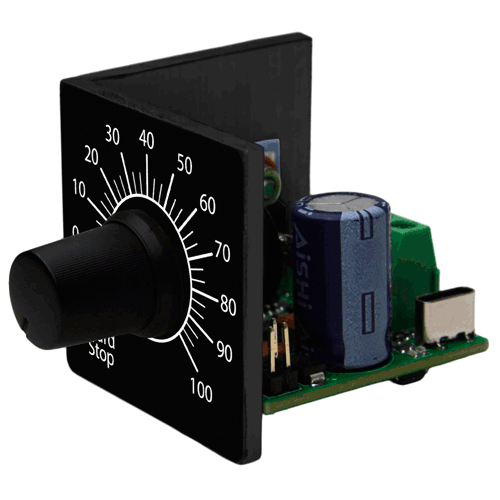
El BMD‑12 está fabricado como un dispositivo electrónico sin carcasa y está destinado a ser empotrado en un panel. El dispositivo es cómodo de usar para paneles de control de operador de varios dispositivos.
Modos de control de velocidad
- control de velocidad por potenciómetro sin estabilización;
- control de velocidad por potenciómetro y estabilización por contra EMF;
- ajuste de la velocidad mediante parámetros a través de USB sin estabilización;
- ajuste de la velocidad y estabilización mediante parámetros a través de USB.
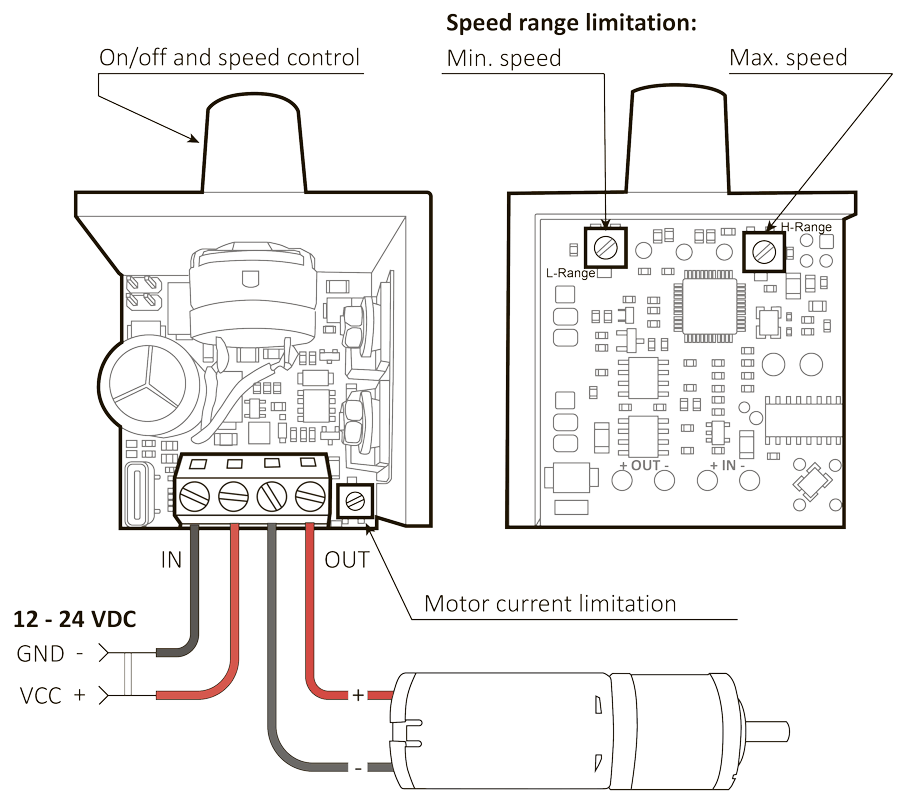
La velocidad del motor se puede ajustar mediante un potenciómetro o mediante software (conexión a un PC mediante USB).
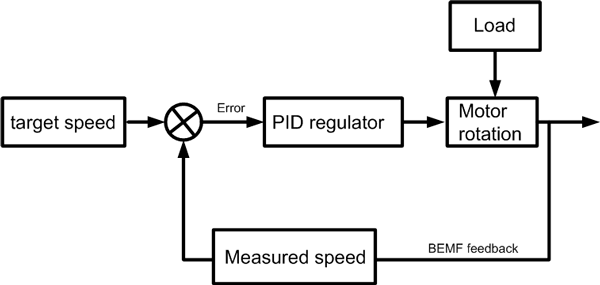
Compensación de carga y estabilización de velocidad
La función de compensación permite estabilizar la velocidad del motor independientemente de la carga en el eje del motor. No se requiere un codificador externo en el motor, la velocidad se estabiliza utilizando el EMF medido durante la rotación del motor.
Protección contra sobrecarga del motor
Los controladores BMD‑12 disponen de una protección ajustable contra la sobrecarga del motor. El usuario puede ajustar el valor máximo de corriente del motor hasta 12A. Esta función puede utilizarse tanto para proteger el motor de una sobrecarga de corriente como para proteger la mecánica de un par superior al permitido.
Ajuste por software de los parámetros de funcionamiento
Los parámetros de funcionamiento se pueden controlar y ajustar a través de USB. El software se suministra con el dispositivo. El software permite ajustar el modo de control, la velocidad objetivo y los valores objetivo de back EMF, la relación de aceleración y frenado, así como configurar los parámetros PID para el modo de estabilización de velocidad.
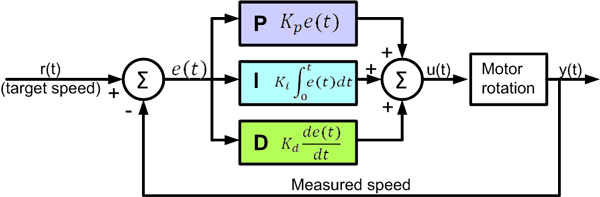
Controlador PID completo
Los requisitos de precisión para mantener las revoluciones y la velocidad de estabilización dependen de la tarea específica y pueden variar considerablemente. Los motores de diferentes modelos presentan características distintas y responden de diferentes maneras a los cambios de carga y a la compensación de la velocidad. Además, la propia naturaleza de la carga puede tener diferentes parámetros (inercia, ciclicidad, variación en el tiempo).
Para adaptar cualquier modelo de motor a tareas con altos requisitos de precisión en el mantenimiento de la velocidad y configurarlo para trabajar con carga variable, los controladores BMD‑12 implementan un controlador PID completo, cuyos coeficientes son editables.
La modificación del coeficiente proporcional permite ajustar el tiempo de reacción del accionamiento ante cambios de carga y velocidad, así como reducir el tamaño del error constante. El coeficiente integral permite eliminar el error de velocidad establecido, mientras que el componente diferencial elimina las oscilaciones del sistema. Así, el controlador con un regulador PID permite lograr un funcionamiento suave del accionamiento a velocidad constante, sin tirones al cambiar la carga en el eje del motor.
Compensación de carga y estabilización de la velocidad basada en la fuerza electromotriz (BEMF) de contrafase del motor.
En los controladores BMD‑12, la estabilización de la velocidad se implementa sobre la base de la fuerza electromotriz de contrafase del motor, ya que este método es el más óptimo tanto en términos de costo del sistema final como en los parámetros de funcionamiento del motor.
Se sabe que la velocidad de rotación del eje de un motor de corriente continua con escobillas depende de la magnitud del par de carga. Para estabilizar la velocidad al cambiar la carga, se requiere un controlador externo y un sistema de retroalimentación que permita detectar el cambio, corregir la acción de control y estabilizar la velocidad de rotación.
Existen varias opciones de retroalimentación que pueden utilizarse para resolver el problema de estabilización de la velocidad: retroalimentación por corriente, por encoder externo y por fuerza electromotriz del motor.
La estabilización de la velocidad basada en la fuerza electromotriz (FEM) del motor es la opción óptima para sistemas industriales que utilizan motores sin encoder. Por un lado, el sistema resulta económico, ya que puede emplearse con motores sin encoder. Por otro lado, no hay necesidad de realizar un ajuste inicial, como ocurre con la retroalimentación por corriente. Al estabilizar la velocidad basada en la FEM, el controlador supervisa específicamente la velocidad del motor, y la corrección se realiza más rápidamente; al cambiar la carga, no se producen tirones ni oscilaciones automáticas, que son características de los dispositivos con retroalimentación por corriente.
Lea más en nuestro comunicado de prensa
Esquema eléctrico y disposición de los elementos de control
Software y parametrización del controlador BMD‑12
El programa BMD-control-mini está diseñado para la parametrización inicial rápida de los controladores BMD‑12, así como para realizar movimientos de prueba: ajuste de velocidad y aceleración, arranque y parada del motor.

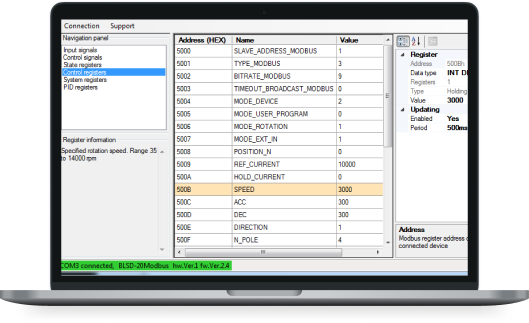
El funcionamiento del controlador se puede configurar correctamente mediante registros, que se pueden cambiar mediante una conexión USB. El software Modbus Basic Utility está diseñado para acceder a todas las configuraciones y registros del controlador. Con la Modbus Basic Utility, puede realizar un ajuste preciso del variador para sistemas con altos requisitos de precisión para mantener la velocidad para cualquier opción de carga y diferentes modelos de motor.