Controlador para motor paso a paso SMSD‑4.2RS
Voltaje
12 - 48 VDC
Corriente de fase máxima
0.2 - 4.2 A
Fracción de paso
1/1 - 1/16
Métodos de control
programa, entrada analogica, STEP/DIR
Interfaces
RS-485, RS-232
El controlador de motor paso a paso con interfaces RS‑232 y RS‑485 se utiliza para el control de software y el control en tiempo real a través de PC o PLC. También se proporcionan control de velocidad analógico y modo STEP/DIR estándar. El método de control programado se utiliza principalmente para sistemas de automatización con procesos repetitivos. El controlador puede funcionar en modo autónomo o como dispositivo secundario controlado por un PLC (PC).
Datos técnicos
Entradas DIR, STEP (Modo de control del controlador STEP/DIR):
Nivel de alto voltaje
4 - 24 VDC
Nivel de voltaje bajo
0 - 1 VDC
Resistencia de entrada
3 kOhm, no less
Salida OUT:
Tipo de salida
transistor
Voltaje máximo de fuente de drenaje
50 VDC
Corriente máxima de drenaje continuo
5 A
Resistencia de canal abierto
15 mOhm
Interfaz de comunicación - RS‑232, RS‑485:
Baudios
9600
Bits
8
Paridad
even
Detener un poco
1
Entradas DIR, STEP (Modo de control del controlador STEP/DIR):
Nivel de alto voltaje
4 - 24 VDC
Nivel de voltaje bajo
0 - 1 VDC
Resistencia de entrada
3 kOhm, no less
Salida OUT:
Tipo de salida
transistor
Voltaje máximo de fuente de drenaje
50 VDC
Corriente máxima de drenaje continuo
5 A
Resistencia de canal abierto
15 mOhm
Interfaz de comunicación - RS‑232, RS‑485:
Baudios
9600
Bits
8
Paridad
even
Detener un poco
1
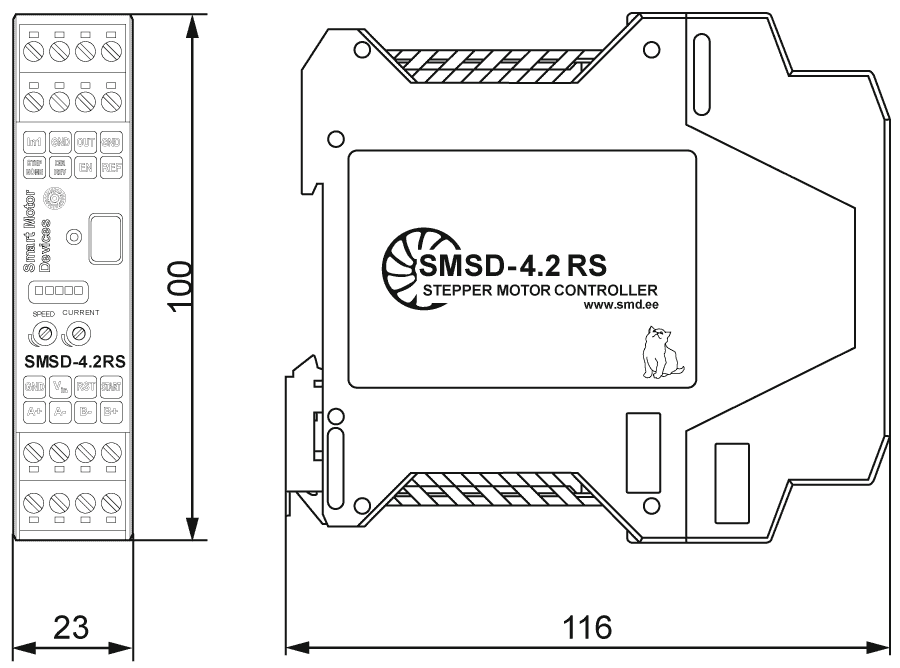
Dimensiones del controlador de motor paso a paso SMSD‑4.2RS
Descripción del controlador de motor paso a paso SMSD‑4.2RS
El controlador SMSD‑4.2RS es un dispositivo programable para controlar motores paso a paso con corriente por fase hasta 4.2 A. SMSD‑4.2RS admite interfaces de comunicación RS-232 y RS-485. La unidad está fabricada en una caja de plástico para montarse en un carril DIN estándar. La unidad controla la dirección, velocidad y aceleración del motor paso a paso y también funciona según algoritmos complejos (programa de usuario ejecutivo) cargados en la memoria interna. El controlador SMSD‑4.2RS puede funcionar de forma autónoma, desde una computadora, PLC u otro dispositivo maestro, recibiendo comandos de control a través de RS-232 o RS-485, o desde un controlador maestro externo que realiza el control por impulsos del variador.
Modos de control del controlador SMSD‑4.2RS:
- Funcionamiento autónomo según un programa de usuario, que queda grabado en su memoria;
- Control de mando en tiempo real;
- Control de posición por pulsos con señales lógicas STEP y DIRECTION;
- Control de velocidad del motor paso a paso analógico.
Conexión del controlador de motor paso a paso SMSD‑4.2RS
Modo de control del programa
El controlador tiene una memoria interna no volátil para cargar y almacenar programas de usuario ejecutivo. Los programas de usuario ejecutivos constan de secuencias de comandos preconfiguradas: algoritmos de operación. El programa puede ser llamado posteriormente mediante una señal externa durante el funcionamiento autónomo del controlador o mediante un comando cuando el controlador está conectado a un PC o PLC. Este modo de control se usa ampliamente para operaciones de procesos cíclicos y repetitivos. Los programas de usuario se graban en la memoria del controlador mediante una conexión RS-232 o RS-485. Se puede utilizar un convertidor de interfaz RS-232/USB o RS-485/USB para trabajar con una computadora. Se proporciona una lista completa de comandos ejecutivos en el protocolo de comunicación abierto del controlador. Nuestra empresa proporciona el software para configurar, gestionar y programar el controlador.
Modo de control directo
Control en tiempo real: el controlador paso a paso se controla mediante comandos enviados desde una computadora o PLC. El controlador ejecuta cada comando tan pronto como lo recibe. Se proporciona una lista completa de comandos en el protocolo de comunicación del controlador. Para el control en tiempo real desde una PC o PLC, se requiere una conexión permanente al puerto de comunicación. La interfaz de datos RS-232 permite conectar 1 controlador a la red. La interfaz de datos RS-485 permite conectar y controlar hasta 32 controladores simultáneamente.
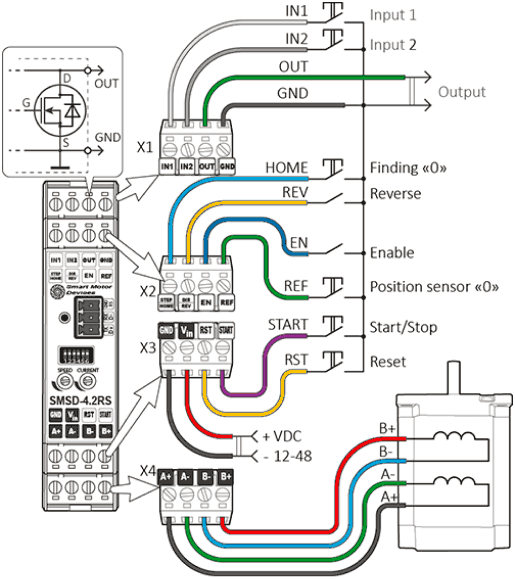
Diagrama de conexión del controlador SMSD‑4.2RS en el modo de control de programa y en el modo de control directo
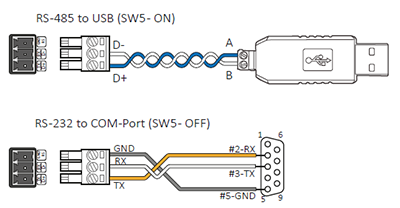
Conexión de interfaces de comunicación
Modo de control de velocidad analógico
Modo de control de velocidad analógico: se utiliza para un control suave de la velocidad del motor paso a paso sin utilizar una computadora o PLC. La velocidad del motor es proporcional a la posición del potenciómetro incorporado ubicado en el panel frontal de la unidad. El sentido de rotación, arranque y parada del motor se controlan mediante señales digitales externas.
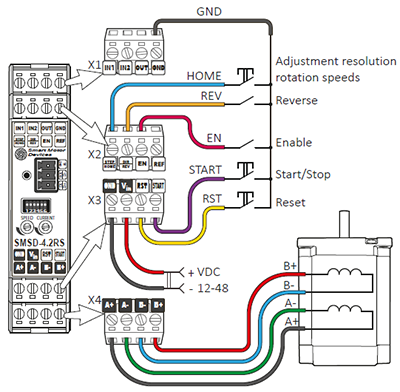
Diagrama de conexión del controlador SMSD‑4.2RS en el modo de control de velocidad analógico
Control de posición de pulso STEP/DIR
Control del movimiento del motor paso a paso con señales estándar STEP y DIRECTION. La velocidad de rotación del motor es proporcional a la frecuencia de las señales STEP, la cantidad de movimiento es proporcional al número de pulsos de la señal STEP. El sentido de rotación depende del nivel de señal en la entrada DIRECTION (DIR). La señal ENABLE se utiliza para habilitar o deshabilitar la rotación.
El movimiento de un paso se realiza en el frente del pulso en la entrada PASO. El cambio de dirección de rotación del motor se realiza cambiando el nivel de señal en la entrada DIR. La parada de emergencia del motor y las fases de desenergización se realizan cerrando los contactos EN y GND, al abrir el contacto se reanuda el funcionamiento.
También es posible controlar el motor paso a paso con una señal bifásica en cuadratura con un desfase de 90º. Una señal de este tipo se puede obtener, por ejemplo, a la salida de un codificador óptico.
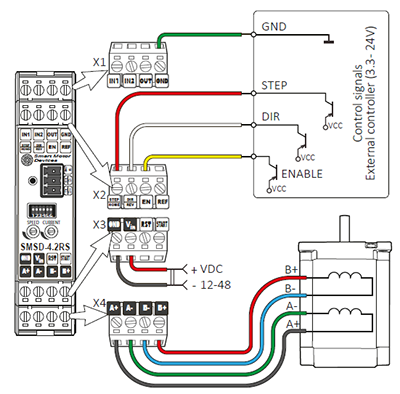
Diagrama de conexión del controlador SMSD‑4.2RS en el modo de control de posición de pulso
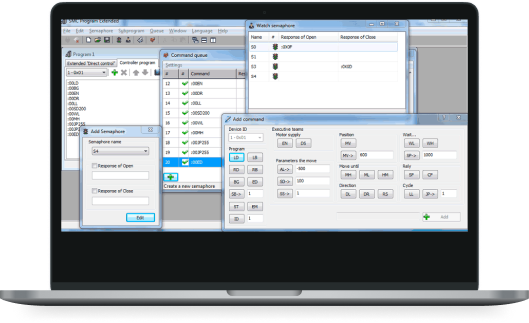
Software para controlador de motor paso a paso SMSD‑4.2RS
SMC-Program-Extended se utiliza con controladores SMSD‑4.2RS para motores paso a paso. La interfaz de comunicación y la lista completa de comandos están abiertas y disponibles en la documentación del controlador. Pero para ahorrar tiempo, brindar soporte a los clientes y brindar comodidad, ofrecemos software listo para trabajar fácilmente y ensamblar programas de ejecución rápida.
El software SMC Program Extended se utiliza para ensamblar y escribir programas de usuario en el controlador y para controlar desde un PC. El software está disponible para descargar en nuestro sitio web. El controlador SMSD‑4.2RS puede recibir y procesar señales de dispositivos y sensores externos en el programa, así como comandos para enviar señales a dispositivos externos. El controlador también proporciona función y señal para buscar la posición inicial.
SMC Program Extended permite al usuario crear algoritmos de operación de unidades paso a paso (programas ejecutivos de usuario), escribirlos en la memoria y leerlos desde la memoria del controlador. También se proporciona control en tiempo real.