Programmable stepper motor controller SMSD‑1.5Modbus ver.2
Voltage
12 - 24 VDC
Max. current per phase
0.15 - 1.5 A
Microstepping
1/1 - 1/256
Control methods
program mode, analog speed control, STEP/DIR
Interfaces
USB, RS-485 (Modbus ASCII/RTU)

SMSD‑1.5Modbus ver.2 is a programmable stepper motor controller with extended functionality. The device can be controlled from a PLC using the Modbus RTU/ASCII protocol, and also work autonomously according to a user program. The controller provides microstepping 1/1 to 1/256. The morphing function provides a smooth transition from microstepping mode to full-step mode at a given speed, thereby maintaining torque at high speeds. Overheating protection is provided. The controllers are able to work in real time and can be used both to build local automation units and distributed I/O systems with data exchange via RS-485 interface with Modbus protocol.
Technical data
Interfaces
USB, RS-485
Communication protocol
Modbus RTU, ASCII
Programming languages
LD – ladder diagrams, IL ‑ instruction list
Max. length of a main user program
28912 instructions
Max. length of a service program
1926 instruction
Minimum processing time for one basic instruction
20 µs
Logic I/O
Logic inputs
8 logic inputs: 2 fast inputs (> 70 nsec), 6 general inputs (> 5 mks)
Logic outputs
8 logic outputs
Logic inputs setting voltage
2.4 VDC
Logic inputs reset voltage
0.7 VDC
Max voltage of logic output of transistor type
80 VDC
Load capacity of the logic output of transistor type
50 mA
PWM signal generation frequency
0.3 – 50000 Hz
Interfaces
USB, RS-485
Communication protocol
Modbus RTU, ASCII
Programming languages
LD – ladder diagrams, IL ‑ instruction list
Max. length of a main user program
28912 instructions
Max. length of a service program
1926 instruction
Minimum processing time for one basic instruction
20 µs
Logic I/O
Logic inputs
8 logic inputs: 2 fast inputs (> 70 nsec), 6 general inputs (> 5 mks)
Logic outputs
8 logic outputs
Logic inputs setting voltage
2.4 VDC
Logic inputs reset voltage
0.7 VDC
Max voltage of logic output of transistor type
80 VDC
Load capacity of the logic output of transistor type
50 mA
PWM signal generation frequency
0.3 – 50000 Hz
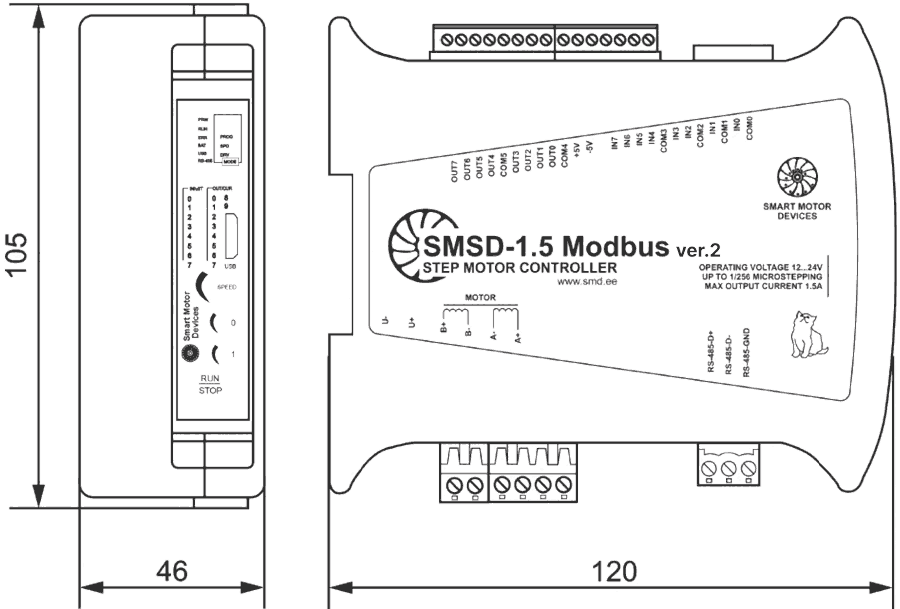
Dimensions of programmable stepper motor controller SMSD-1.5Modbus ver.2
Description of programmable stepper motor controller SMSD-1.5Modbus ver.2
SMSD-1.5Modbus ver.2 provides the following control modes:
- Program mode - this mode is designated for autonomous operation according to a given user program and for direct control of a stepper motor using the Modbus protocol. The controller can be pre-programmed similarly to general industrial PLC. The software for adjusting of the device, user programs assembling and motor control is offered free of charge. SMSD-1.5Modbus ver.2 provides the function for debugging of user programs. This function makes it easier to write long and complex operation algorithms and allows finding errors quickly at the stage of user program debugging.
- Analog speed control mode - it is used to set the motor rotation speed with a potentiometer at the front panel of the controller or with external buttons or an encoder.
- Pulse position control STEP/DIR - the standard pulse mode for control of STEP and DIRECTION signals. The stepper motor rotation speed is proportional to the frequency of the STEP signals, the displacement is proportional to the number of pulses of the STEP signal. The direction of rotation depends on the signal level at the DIRECTION (DIR) input.
The motor controller has 8 logic inputs and 8 logic outputs. Their state can be read or set programmatically from a user program (which is loaded into the memory of the device) or by a direct command via the Modbus protocol. The internal program can be assembled, written to the controller and read from it both via the USB port or RS-485. Free software is provided to configure the controller, create and edit internal user programs.
Functions and possibilities of the programmable stepper motor controller SMSD-1.5Modbus ver.2:
- Communication interfaces are USB and RS-485 are intended for connection to a PC or PLC;
- Autonomous control of the stepper motor according to the program stored in the controller's memory;
- Real-time stepper motor control by commands from a computer or PLC via Modbus;
- Reading and writing the executive user program to the controller's memory via Modbus;
- Program control of discrete outputs is provided;
- Pulse position control with standard signals 0 - 5 V STEP, DIRECTION and ENABLE;
- Analog speed control is available: using the built-in potentiometer, external buttons or encoder.
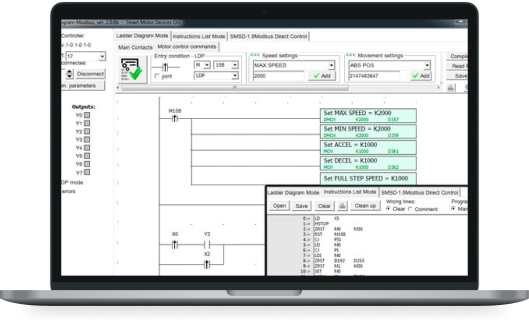
Software for programmable stepper motor controller SMSD-1.5Modbus ver.2
To configure the controller parameters and control the drive, we provide an open communication protocol. You can also use the free software SMC-Program-Modbus. The program is intended to control the operation of stepper motor, assemble user programs using LD and IL languages and write them to the controller's memory.
Downloads
Get a quote
Dear guest
Thanks for your message!
We will contact you as soon as possible.
Error
Something goes wrong.
Please try later.