Stepper motor driver SMD‑4.2 open frame
Voltage
12 – 48 VDC
Max. current per phase
2.7 - 4.2 А
Microstepping
1/1 - 1/256
Control methods
Analog input, STEP/DIR
Version
open board without housing
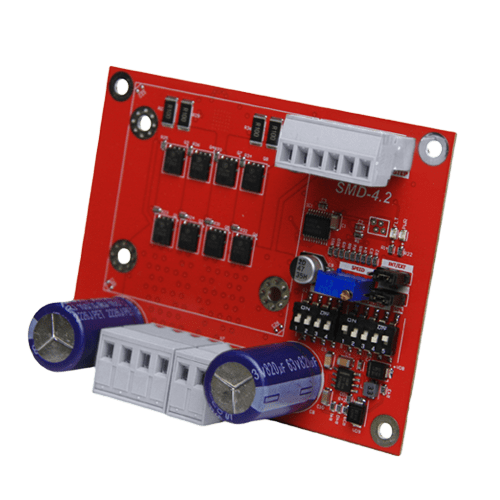
Stepper motor driver SMD‑4.2 open frame is manufactured in a frameless design, in the form of an open board with mounting holes. There is also a carrier kit version of the driver with a DIN clamp. This compact and lightweight driver is designed for smooth movement of the stepper motor with microstepping up to 1/256, provides excellent dynamics and high motor torque.
Technical data
Inputs STEP, DIR, ENABLE:
High voltage level
5 - 12 VDC or 24 VDC
Low voltage level
0 - 1 VDC
Maximum frequency of pulse STEP signal
200 kHz
Input SPD:
Voltage range of the control analog signal
0.1 – 10 VDC
Input impedance
30 Ohm
Input current
1 mA
Inputs STEP, DIR, ENABLE:
High voltage level
5 - 12 VDC or 24 VDC
Low voltage level
0 - 1 VDC
Maximum frequency of pulse STEP signal
200 kHz
Input SPD:
Voltage range of the control analog signal
0.1 – 10 VDC
Input impedance
30 Ohm
Input current
1 mA
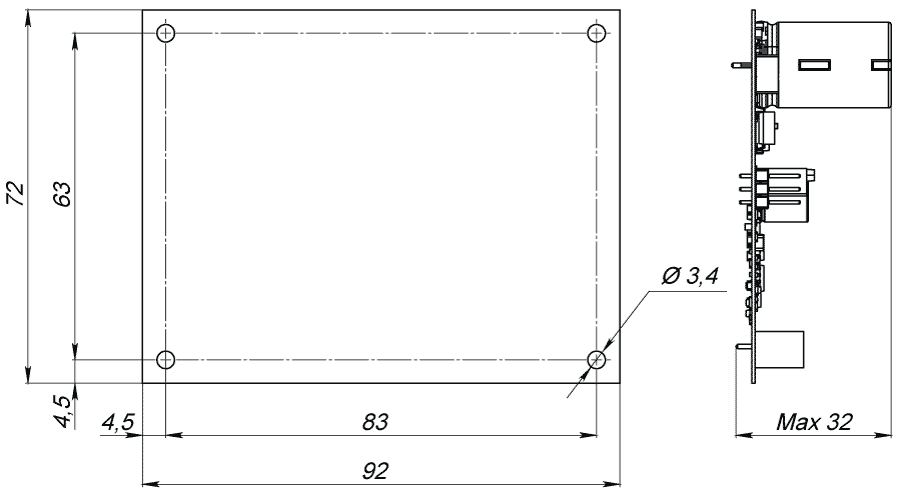
Dimensions of stepper motor driver SMD‑4.2 open frame
Description of stepper motor driver SMD‑4.2 open frame
The SMD‑4.2 stepper motor driver is manufactured in a frameless design, in the form of an open board with mounting holes. There is also a carrier kit version of the driver with a DIN clamp. The compact and lightweight driver is small in size and does not require much space at the installation site. The operation of the stepper motor with SMD‑4.2 driver is characterized by low vibration and noise. The driver works with microstepping up to 1/256, provides high motor output torque.
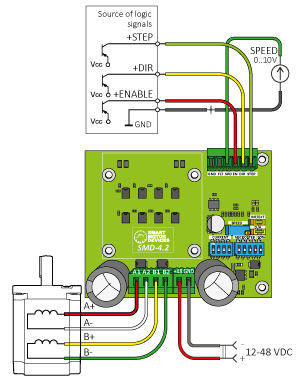
Control methods of stepper motor driver SMD‑4.2 open frame
- Pulse position control
Pulse position control of the stepper motor is provided by standard logic signals STEP/DIR and ENABLE. - Analog speed control
Analog stepper motor speed control can be done in two ways: - external voltage signal 0 - 10 VDC;
- built-in potentiometer.
Connection of stepper motor driver SMD‑4.2 open frame
Downloads
Get a quote
Dear guest
Thanks for your message!
We will contact you as soon as possible.
Error
Something goes wrong.
Please try later.